 The Happymodel Mobula 6 is proving to be one of the most popular drones of early 2020 just like the mobula 7 in 2019. What makes it so successful? It is small, light and agile and fast enough given the power source. And, with the introduction of esc firmware capable of running at 48khz, it seems to offer the flight time. Even though it’s a great quad as is, I always like to tinker to see what can be squeezed out. In my opinion it is the super light weight of the Mobula6 that makes it so good in all the parameters above, so how to make it better? Make it EVEN lighter.
So how is it done?
Get a pack of zip ties (like these) that are at least 80mm long and 4mm wide. The smaller the zip mechanism the better. Use a new blade on a hobby knife to cut a slit along the length as below. The lens of the camera will be wedged in this slit and tightened at an angle that suits your flying.
6 Comments
 The Happymodel Mobula7 uses a F3 based flight controller and since Betaflight 3.4, these boards have not had full functionality of F4 and F7 boards due to smaller memory size for firmware storage. However in this article I will cover how to upgrade to the performance edition of Betaflight 4.04 kindly compiled by UAVTech (his in depth YouTube Channel is here). This special version adds the key performance functions at the cost of typically irrelevant features like servo control, acro trainer, camera control etc. In this article I will show you where to access this firmware and then I'll show you the filters that suit brushless whoops best as well as some good starting PIDs. This is the seventh and likely final article in my series of HappyModel Mobula7 upgrades, many of which can be used for the Trashcan too. Also to come are:
Betaflight 4 Performance edition for F3 boards This is the final version of Betaflight you can use and I strongly recommend you use this version rather than the one on the Betaflight configurator to get full performance functionality otherwise you will miss out on features like:
 The Happymodel Sailfly X is my favourite quad I've reviewed so fat this year (review is here) but as with any product, there are shortcomings especially when is it built to a price. Like I did with the Mobula7 I'm starting a new series of articles on upgrading and customising the Sailfly-x. Current State
Step 1: Software only
The most simple mod to do is ensure the onboard receiver is given an armchair ride from a software standpoint. This means changing D16 to D8 mode in betaflight and turning off telemetry which has been known to lock up the flight controller. This can be done as below.
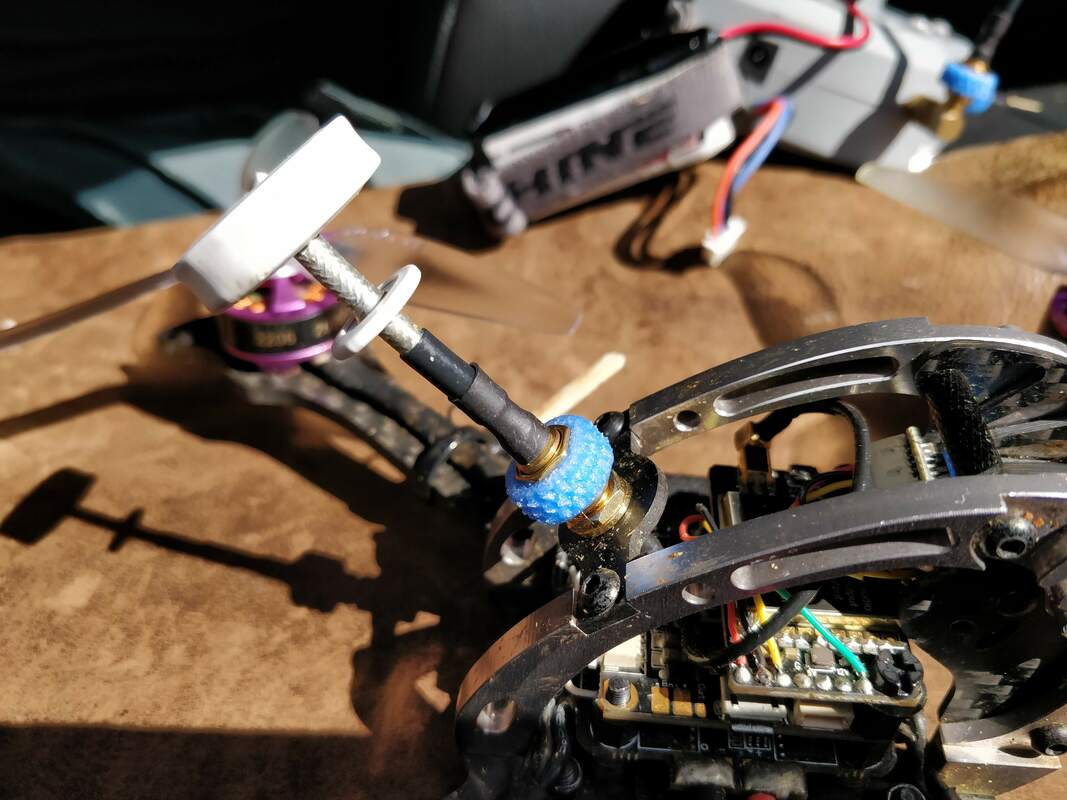
I promise I'll keep this one short. We are forever taking antennae on and off our quads and goggles as we arrive and leave our flight locations. I'm guilty of being too eager to get in the sky and not tightening my antennae correctly thereby leaving a poor connection to the active element on both the quad and goggle ends. Using a spanner is not a fix I'd recommend as it is easy to over-torque and damage the antenna or mount.
The fix here is really easy and I got the tip from my favourite VAS antennas which all include a plastic knurled grip (now I know why). Using a knurled grip that sits over the hexagonal drive on an SMA-style connecter allows you to get a better grip and more torque on tightening whilst avoiding over torquing as above. To put this another way - using these grips allows you to get the right tightness every time - good for the best connection and it will also help them coming loose in flight.  This mobula 7 is getting more and more upgraded This mobula 7 is getting more and more upgraded Introduction The crazybee F3 and F4 series of all in one boards that are the heart of the mobula7, m7hd, eachine trashcan, snapper7, ur65, uk/us65 and even beta75pro2 are an amazing piece of technology that incorporates a flight controller, 4xBL_HeliS ESCs and a receiver. Cramming all of this on one board does mean some compromises though and the biggest one for me is the poor receiver range. This brief article will show how to get a minor improvement with zero investment. Note: this mod is relevant for all the models listed above. This is the third article in my series of HappyModel Mobula7 upgrades, many of which can be used for the Trashcan too. Also to come are:
 Introduction In order to run 2s, the Mobula 7 comes standard with 2 x PH2.0 connectors that allow you to run 2 x 1s batteries in series. When running in series the strength of the connection is determined by the weakest link in that circuit. The strength of connection determines the maximum current that can pass and the voltage drop that results. Although it works this system has a very low current overhead from a design perspective - 2 x budget PH2.0 connectors with the dreaded 'folded' pin and very lightweight 26AWG wire. All this adds up to a lot of voltage drop when even reasonable current is pulled - something all will be familiar with on the mobula where you see voltage drop to scary levels (6v and below) during punches even when you have a full battery. Although it recovers almost immediately it does mean you don't get access to the battery's full voltage potential. This is the second article in my series of HappyModel Mobula7 upgrades, many of which can be used for the Trashcan too. Also to come are:
 The Mobula7 v3 frame (same as the Eachine trashcan frame) The Mobula7 v3 frame (same as the Eachine trashcan frame) Introduction and why I like the Mobula7 better. It's been a few months since I reviewed the HappyModel Mobula 7 (here) and have more recently reviewed the Eachine Trashcan here. Since reviewing the Trashcan I've been flying the Mobula 7 more and find I actually prefer it. Why? Even thought the image quality is better I can't get used to the narrow vertical field of view on the traschan's EOS2 16:9 camera and I find the 0803 motors on the trashcan draw too much power on without delivering a whole lot more speed. The Mobula7's major downside is the frame which breaks easily even though the v2 frame is an improvement and e6000 glue (as tested here) is great for repairs. For this reason I've written an article for newcomers on how to upgrade to the V3 (trashcan) frame which completely addresses the strength issues. This is the first article in my series of HappyModel Mobula7 upgrades, many of which can be used for the Trashcan too. Also to come are:
Instead of just writing about it, please see the steps below with captions. Click on the picture to embiggen
 Introduction
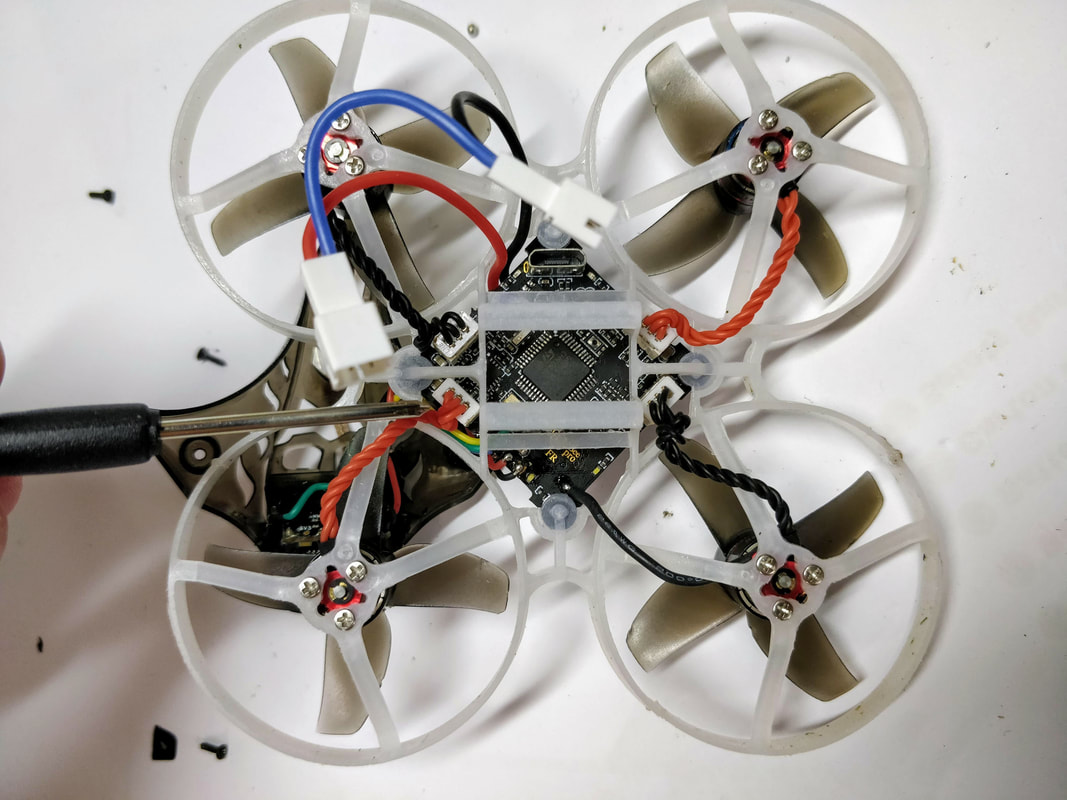
Recently I've reviewed the Eachine Trashcan and in many ways it is superior to the Mobula7 as I found in my review here. One omission from the trashcan though compared to the Mobula7 is the lack of a physical beeper. On the upside though is that the trashcan (like most other brushless quads) uses Dshot as the ESC protocol meaning you can use the motors as a beeper. This is in fact immediately available on the Trashcan with some simple software changes which I will outline below. |
Archives
November 2020
Categories
All
 |
||||||||||||||||||||||









 RSS Feed
RSS Feed
Thanks for visiting QuadifyRC.com Follow us on facebook below to get all the latest updates