 The Happymodel Mobula7 uses a F3 based flight controller and since Betaflight 3.4, these boards have not had full functionality of F4 and F7 boards due to smaller memory size for firmware storage. However in this article I will cover how to upgrade to the performance edition of Betaflight 4.04 kindly compiled by UAVTech (his in depth YouTube Channel is here). This special version adds the key performance functions at the cost of typically irrelevant features like servo control, acro trainer, camera control etc. In this article I will show you where to access this firmware and then I'll show you the filters that suit brushless whoops best as well as some good starting PIDs. This is the seventh and likely final article in my series of HappyModel Mobula7 upgrades, many of which can be used for the Trashcan too. Also to come are:
Betaflight 4 Performance edition for F3 boards This is the final version of Betaflight you can use and I strongly recommend you use this version rather than the one on the Betaflight configurator to get full performance functionality otherwise you will miss out on features like:
16 Comments
 A quick announcement - user sbstnp from the RCGroups Betaflight Thread has kindly recompiled the betaflight Omnibus F3 target to allow the good stuff - RC smooting, absolute control, Iterm relax and even LED Strip. For those of you familar with the 3.4.0 'performance' version this is much the same but for 3.5 If you are not familiar this file will allow you to run all of the great new features of betaflight 3.5.0 that make it more suitable for micros (esp new dynamic filter and feedforward) and the massive improvements from 3.4.0 as above. I strongly recommend this for your leader 120 or any other micro brushless as all tend to run the OMNIBUS (F3) target. Will follow up with install guide in a few days. Full credit goes to sbstnp for this recompile. Hex file can be found here:
For my list of recommended hardware changes please see my blog: My leader120 is a year old! What I've changed in that time
 Throttle limiting is useful in this 1103 powered quad which uses very cheap motors. Click to see ultralight 2" brusless build Throttle limiting is useful in this 1103 powered quad which uses very cheap motors. Click to see ultralight 2" brusless build Introduction Update: This is relevant for all versions of betaflight 3.4.0 and up. One of the new "minor features" in betaflight that I'm very excited about is throttle limit. Previously throttle limit could only be done through your transmitter software and is a pig to set up and even if you could set up it is difficult to flick between option. For the first time this can be set up in Betaflight with the release of 3.4.0. I'll cover only one type of throttle limit here that will most commonly be used and how to assign varying limits and rates to a transmitter switch. I've put this tutorial together because the throttle limit feature must be accessed through the command line interface (CLI) rather than the graphical user interface (GUI) Firstly if you have played with rate profiles in betaflight before, this is what your the throttle limits are tied to. You can cycle through these with the betaflight OSD when disarmed or if you assign to switches you can change mid flight. Why would I want to limit throttle?: There are a few reasons that are all based around the fact that lmiting throttle will limit current drawn and so limit max RPM and thrust.
It's important to note that your flight controller still has full access to 100% of your throttle meaning that there will be overhead to speed up motors to perform maneouvres and corrections rather than slowing down saturated motors. How do I do it? Easy. First, choose the rate profile you'd like to limit throttle on, up to 6 are available in betaflight now but I only use 3 since I map to a 3 way switch on my transmitter. In the example below I have my 'race rates' on profile 1 and 2 which are identical and use profile 2 for limiting throttle. FYI profile 3 is my freestyle rates. Make sure you press 'save'. 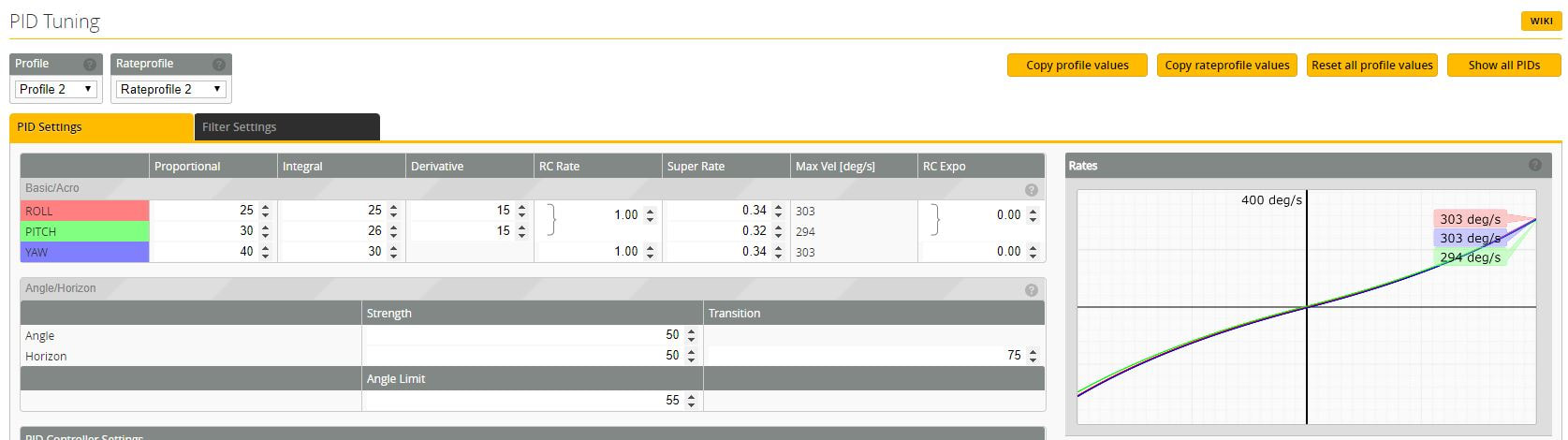 Next go into the CLI mode. type or copy and paste as below: set throttle_limit_type = scale set throttle_limit_percent = 85 save In this example the throttle _limit_type is scale where it creates a linnear throttle curve up to the throttle_limit_percent value. In this case the throttle will linnearly increase to 85% at max throttle on your transmitter. If you wish to turn throttle limiting off again, use: set throttle_limit_type = off save Lastly there is a second throttle limit type "clip" which simply makes the throttle stick have no impact over a set percentage. I think it will only be exceptional case where someone might use this, particularly playing practical jokes on your mates when you have access to their quad. To confirm that your throttle limit settings have stuck you can see in you CLI "diff" as below: 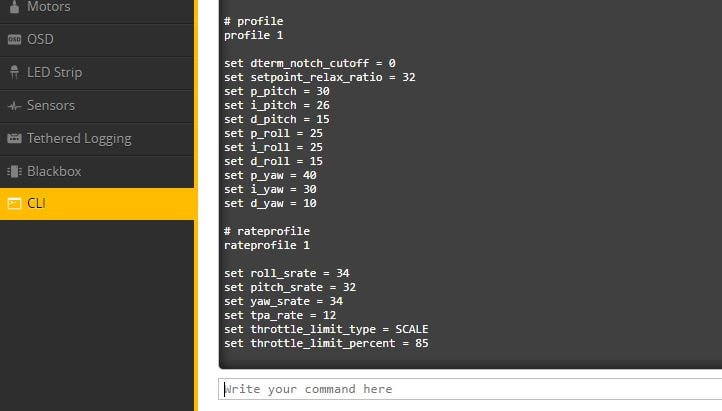 As per the example I used, my rate profile 2 (shown here as rate profile 1 since betaflight uses n-1 naming) has throttle limiting as scale limited to 85% maximum. Setting it to a switch The real usefulness comes in when you set to a switch so I've taken a screen grab to best illustrate - click to embidden. In this same example
Flick the 3 way aux switch will have rate profile 1 in the 'up' positiion, 2 in the 'mid' position and 3 in the 'low' position. I use this across ALL of my brushless quads: 2", 2.5", 3", 4", 5", 6". Now that betaflight has 6 profiles you can get creative and map to a potentiometer or whatever else smokes your tyres.  Conclusion In practice this works well for me on quads with older motors that either vibrate or prop/motor combinations that don't practically put out any more thrust after a certain amount of throttle, rather they just draw more current. I do really like the new filtering of the newly released 3.4.0 but for me throttle limiting is one of the most underated features in this release which I expect to see in all subsequent releases too. Reference: The original betaflight throttle limit pull request can be found here: https://github.com/betaflight/betaflight/pull/5608 |
Archives
November 2020
Categories
All
 |
||||||||||||


 RSS Feed
RSS Feed
Thanks for visiting QuadifyRC.com Follow us on facebook below to get all the latest updates