|
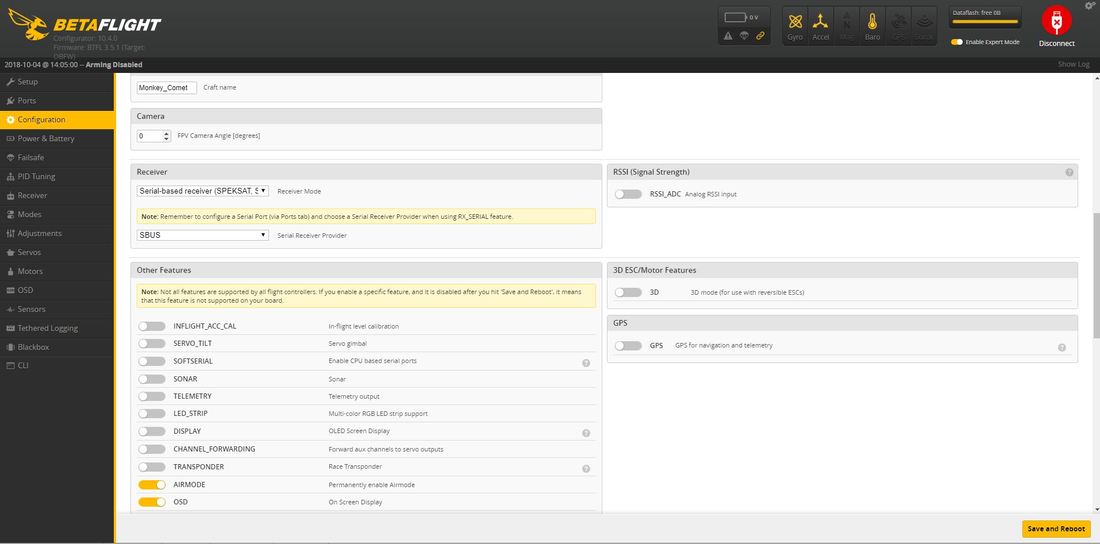
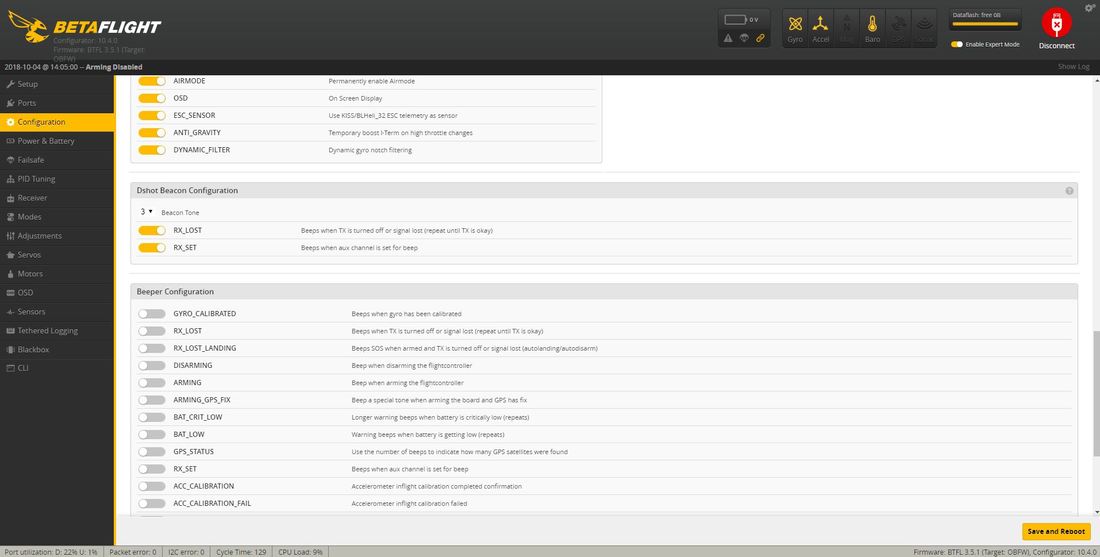
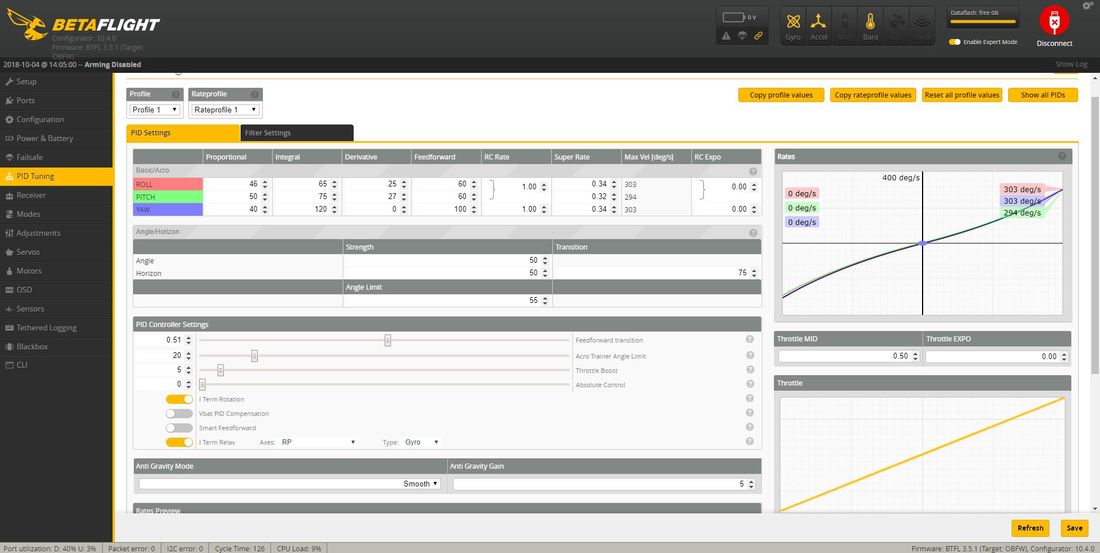
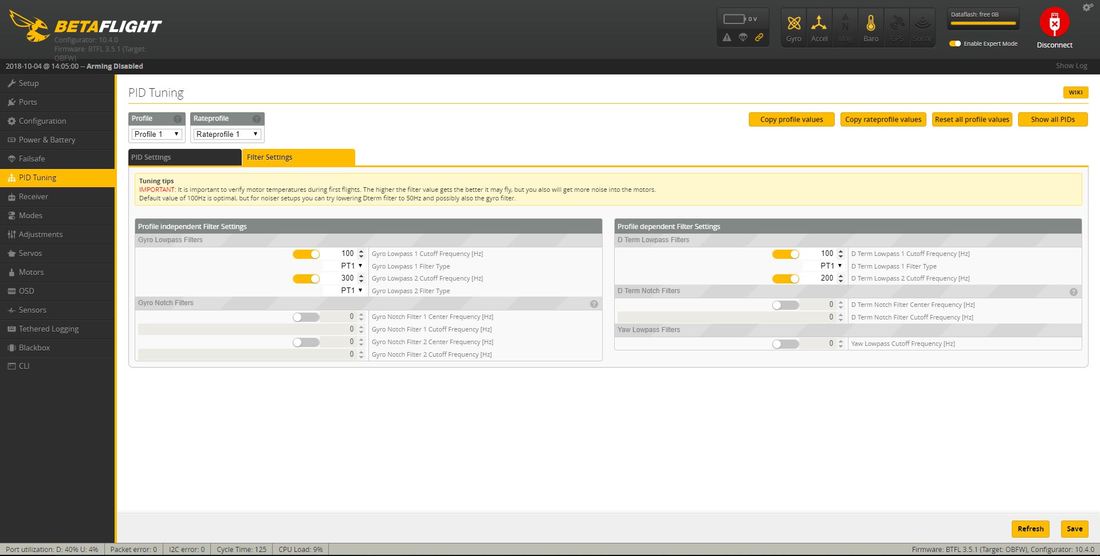
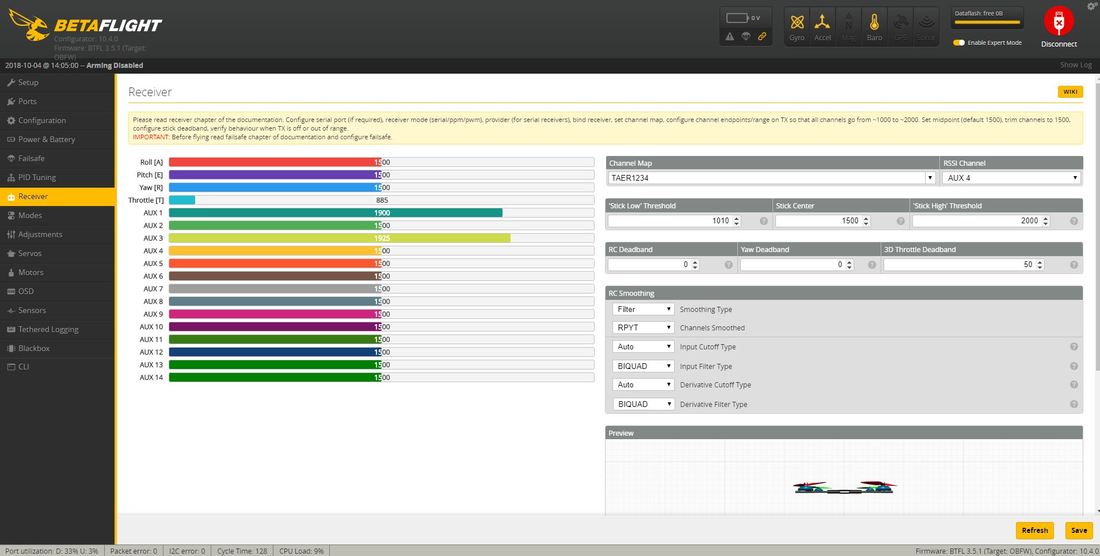
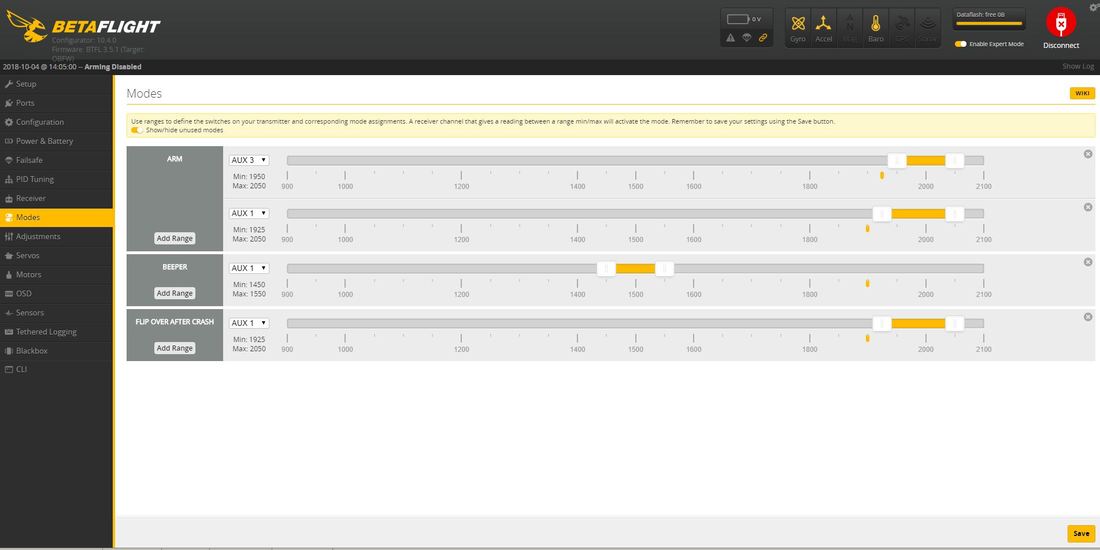
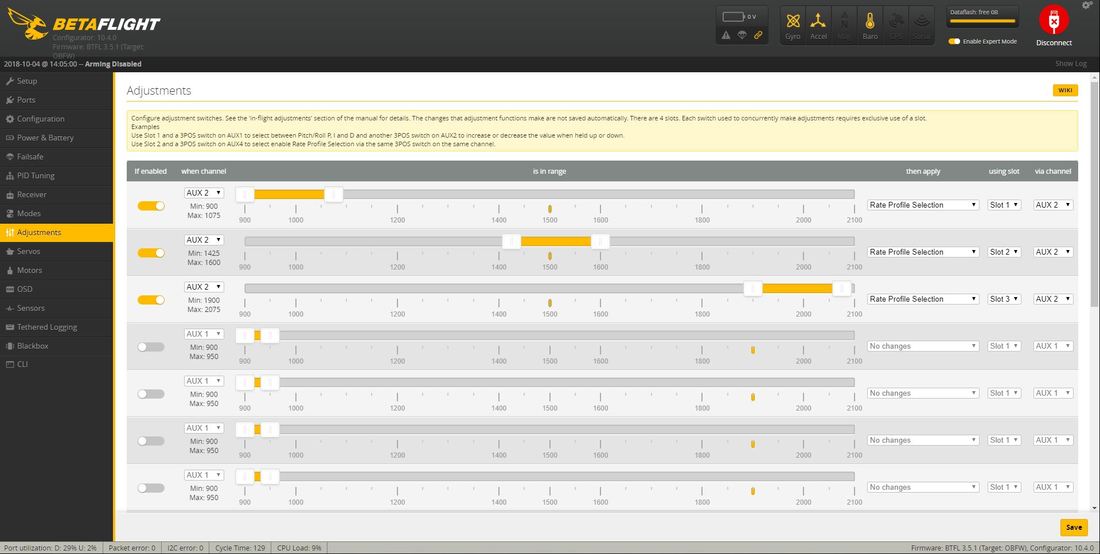
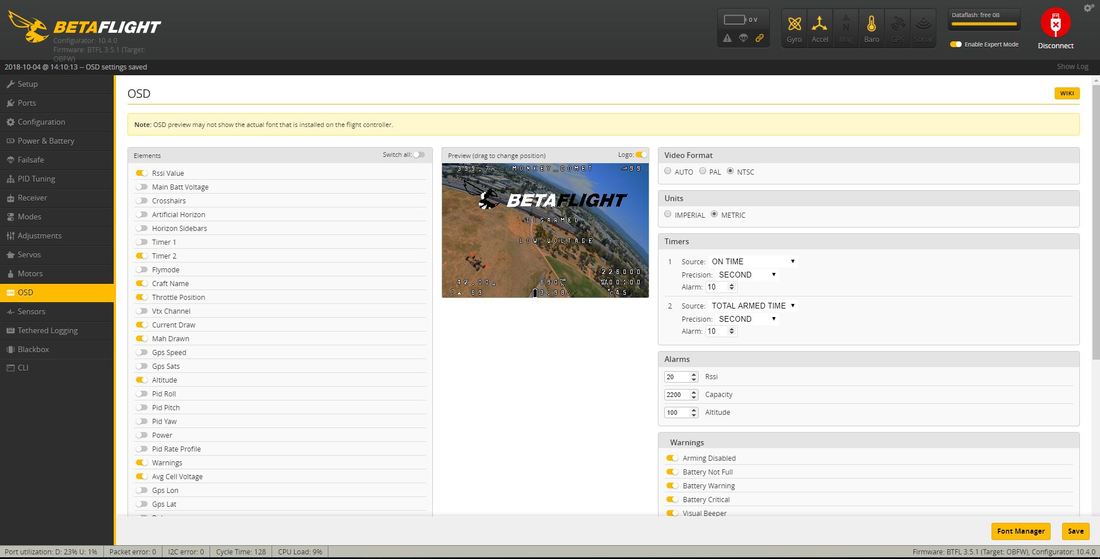
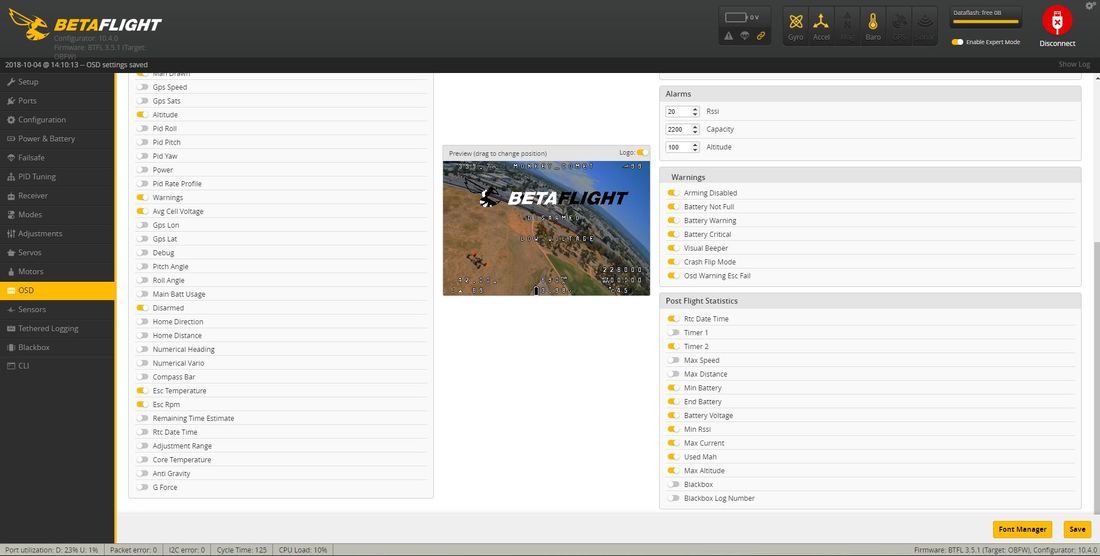
This is the second part of my coverage of the Hobbymate Comet 5" quadcopter. The first part (parts overview and build walkthrough) can be found here and the third part (review) can be found here. If you are here for the PIDs scroll directly to the bottom but would recommend you read through as tuning in betaflight 5 is more than just the PIDs.  Betaflight setup on this quadcopter is the same as any other but because of the telemetry, VTX OSD control, resource mapping for an ESC that is rotated it is fairly involved. For that reason I have created a betaflight 3.5.1 diff file which can be downloaded below. If you built the way that I did feel free to just load this CLI diff. If you want to read on to see what I changed specifically it's all documented in screenshots and text below. I'll assume a moderate level of betaflight understanding from the audience but happy to point out more information if needed. My customised 3.5.1 CLI diff file is here:
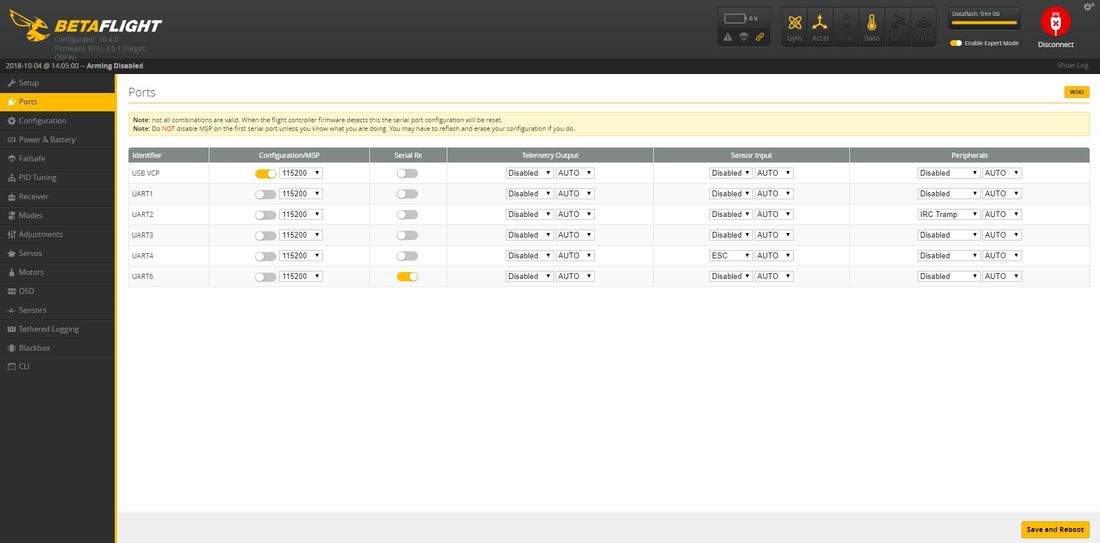
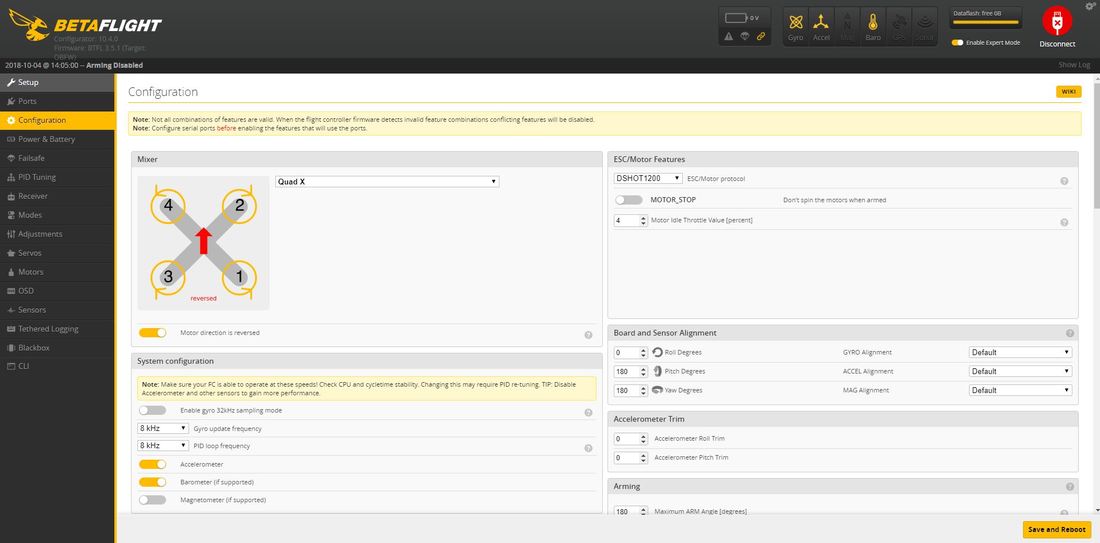
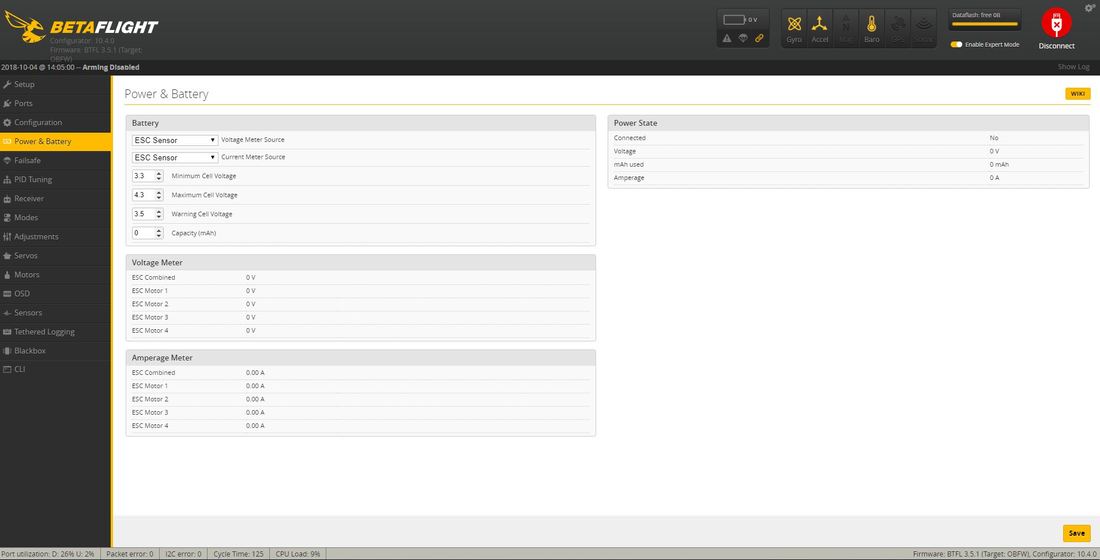
Resource mapping this diff will change the motor output to be correct assuming you have mounted your ESC with the connector at the back (which I recommend as per build walkthrough) BLHeli32 settings These are best described by the screengrab below. Changes from stock are PWM rate increase to 48kHz for smoothness, motor direction adjusted for reverse prop direction (you will need you own values here), Auto motor timing, quiet dshot start up tone, loud shot beeper, min and max throttle adjusted for max resolution and most importantly I've used +25% to calibrate the ESC current meters correctly and have validated this number on my setup. 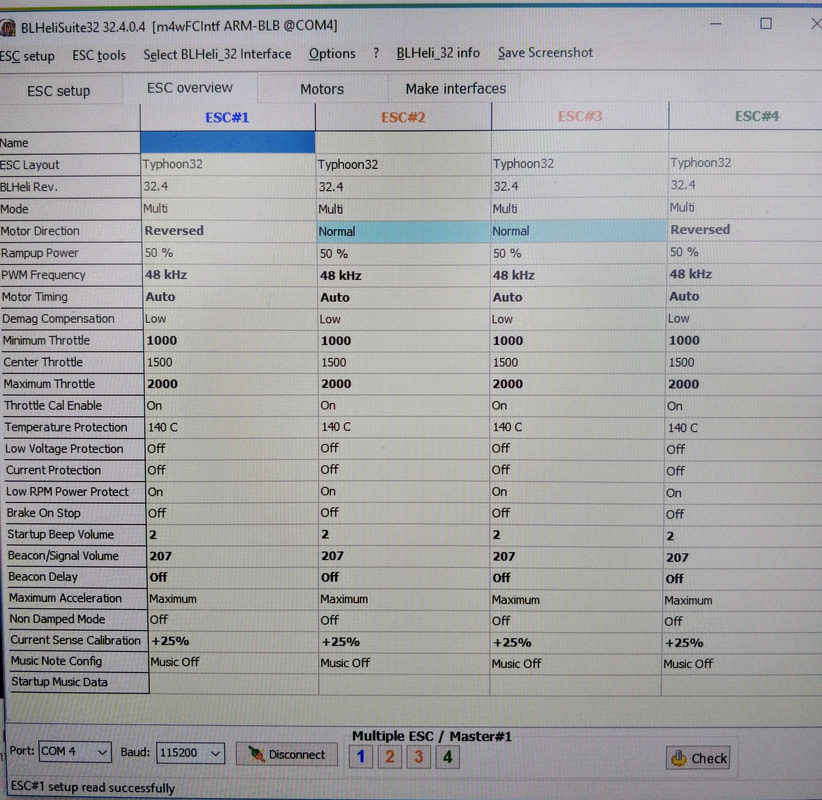 The Hobbymate comet is a 5" quadcopter that is sold in kit, or ready to fly forms and surpasses the Emax Hawk 5 and HGLRC Batman in specs and performance, especially running 6s natively. Better yet it is priced much more sharply. It is available exclusively from HobbyCool.com. My final review is now complete and can be found here
0 Comments
Leave a Reply. |
|||||||||||||||
Thanks for visiting QuadifyRC.com Follow us on facebook below to get all the latest updates