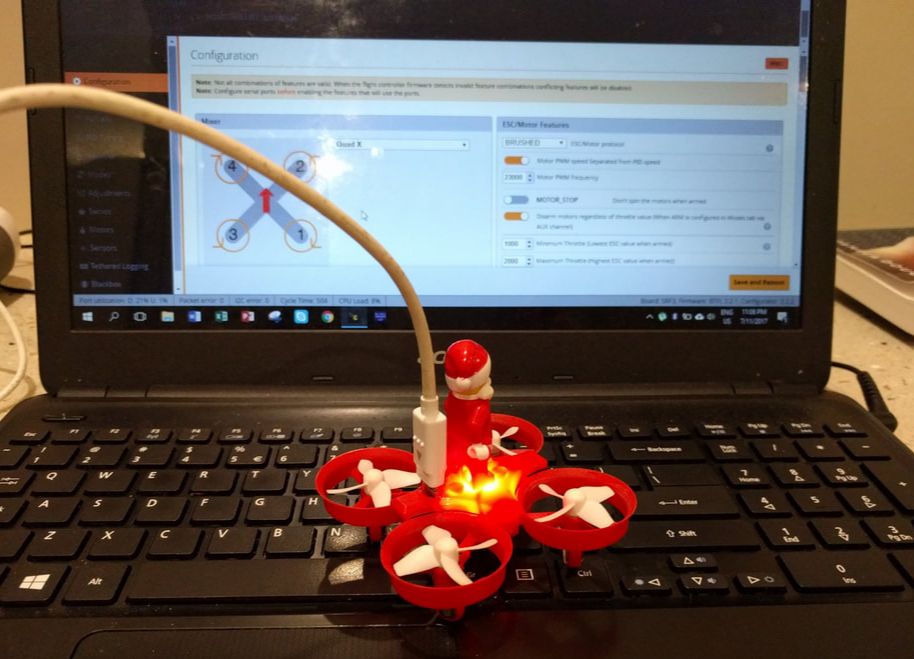
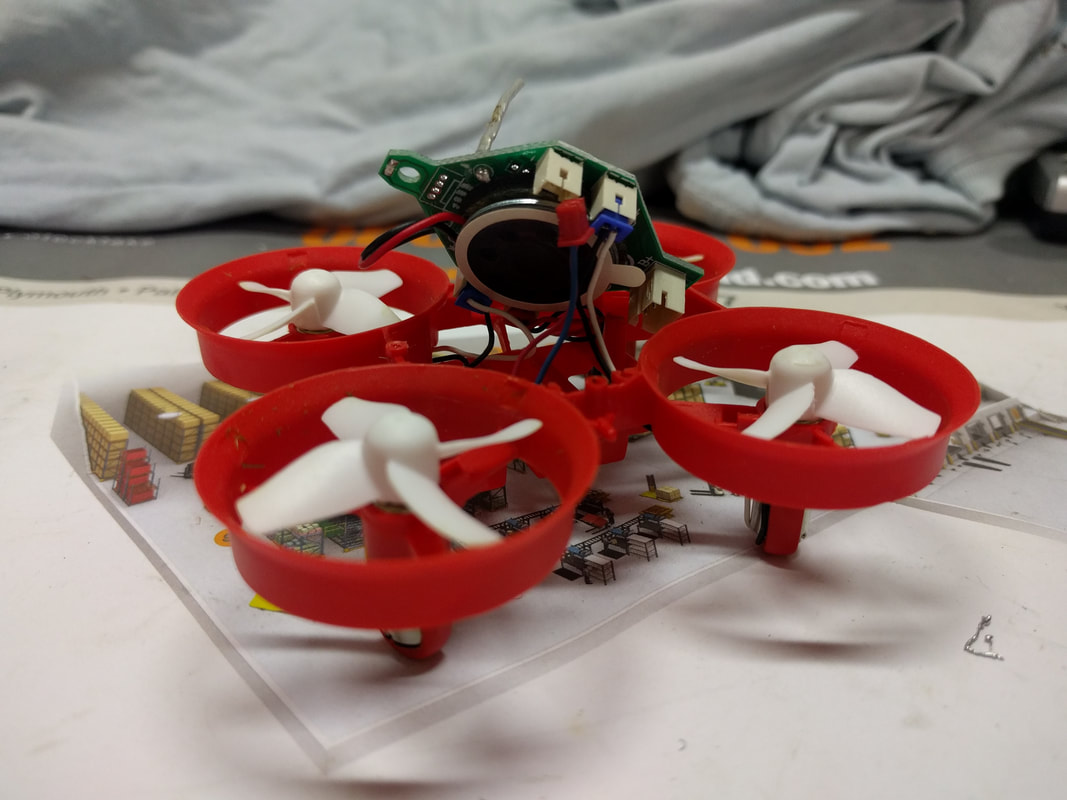
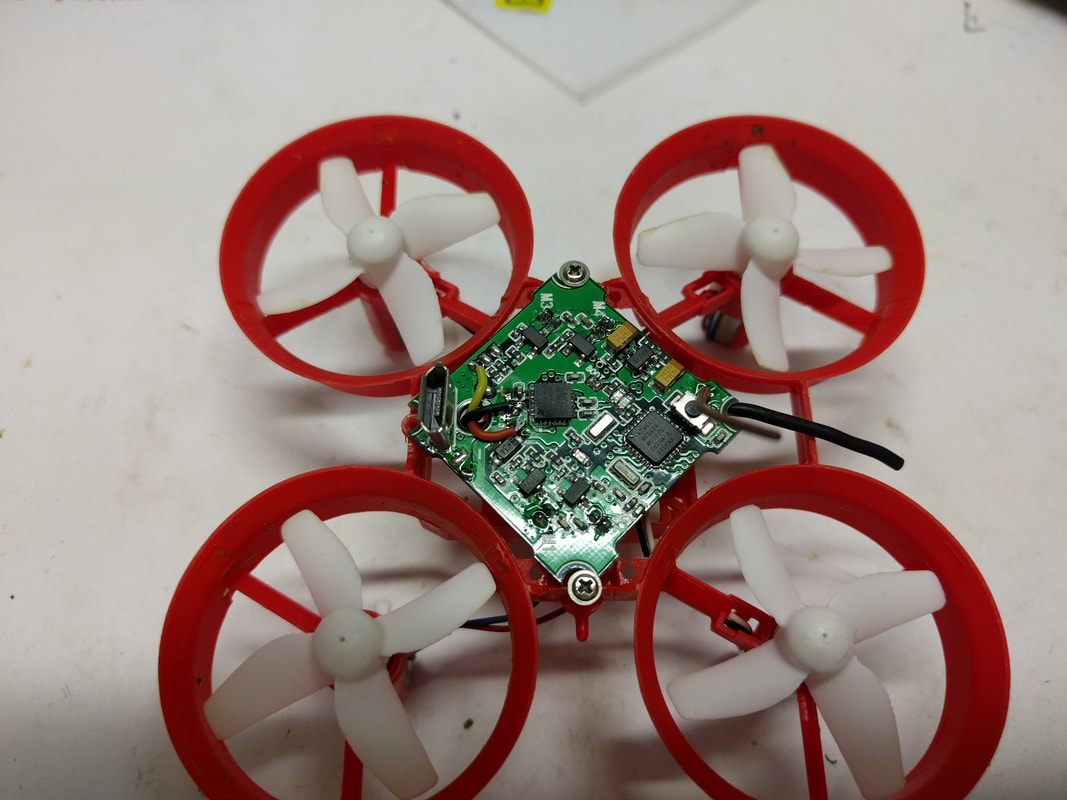
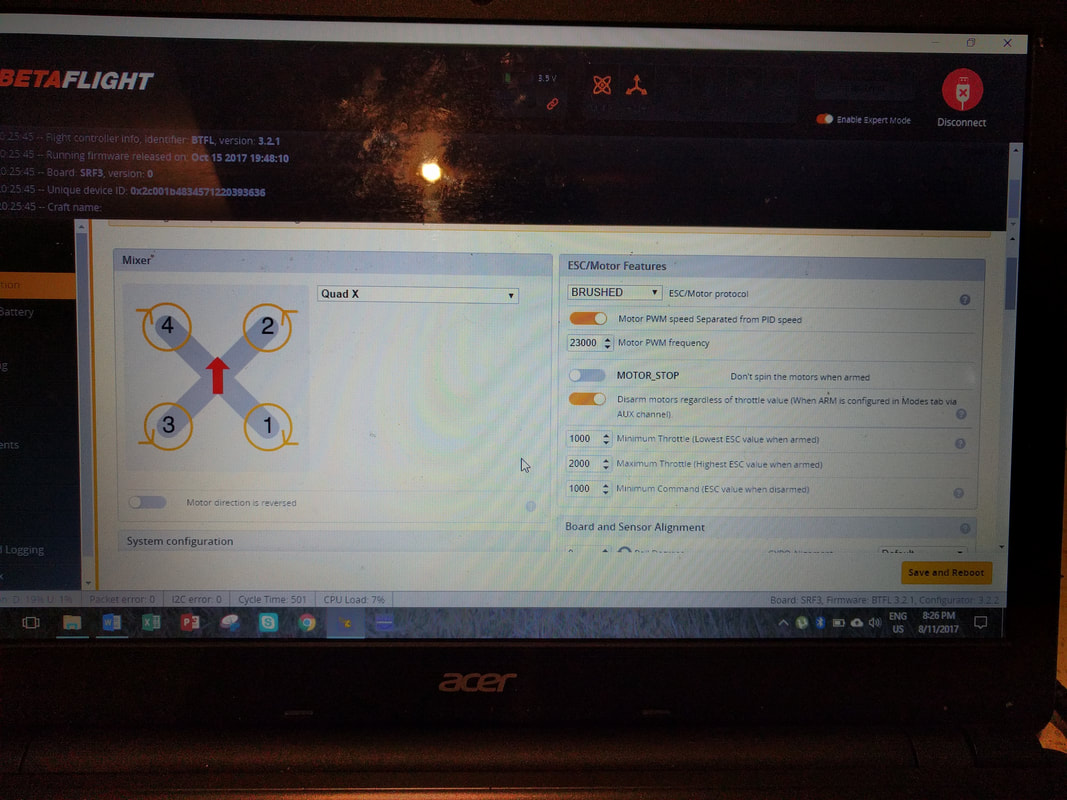
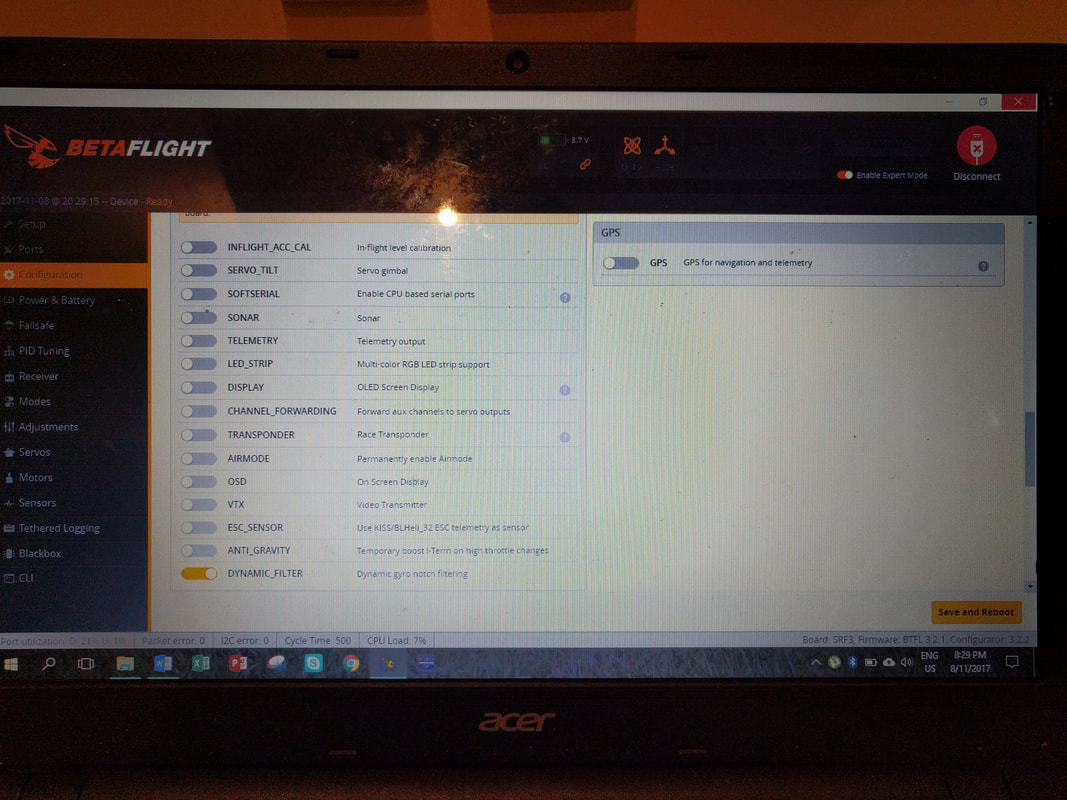
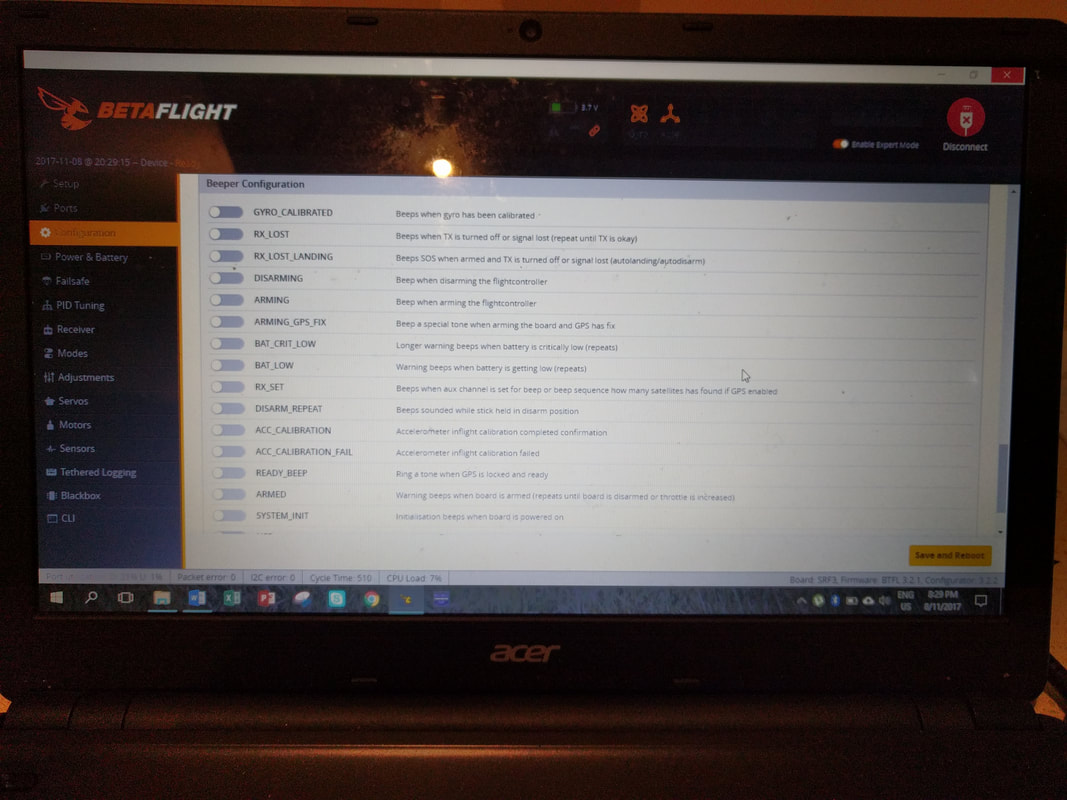
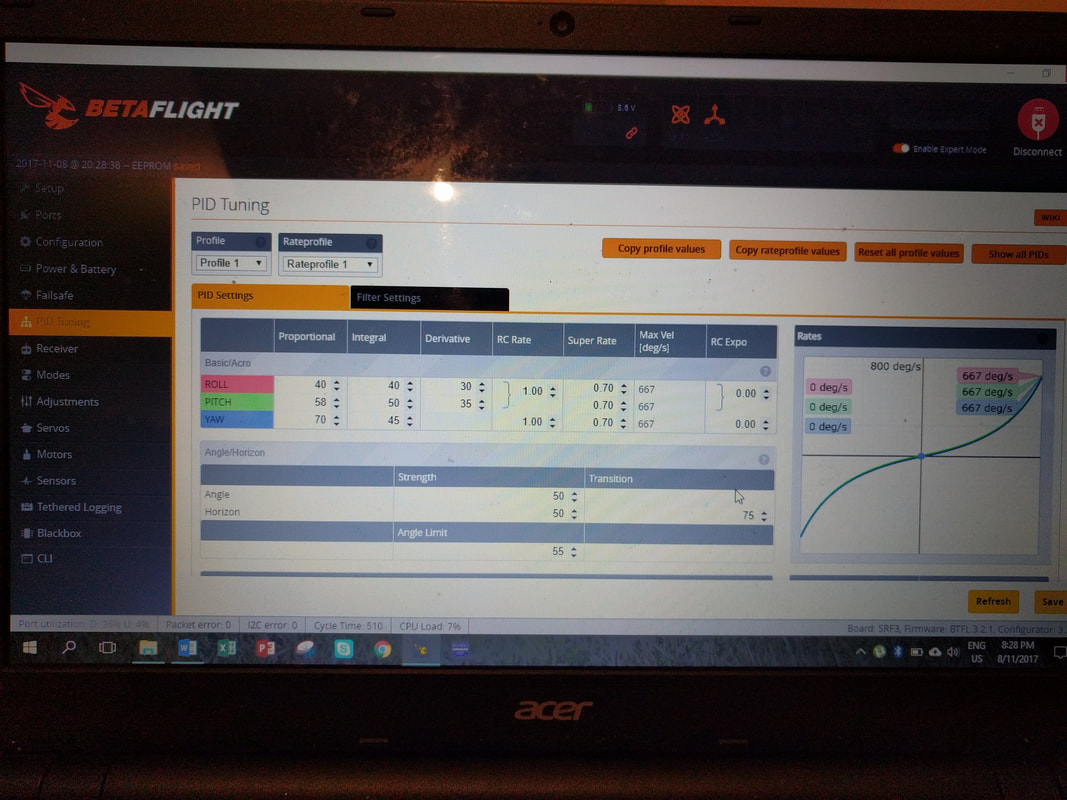
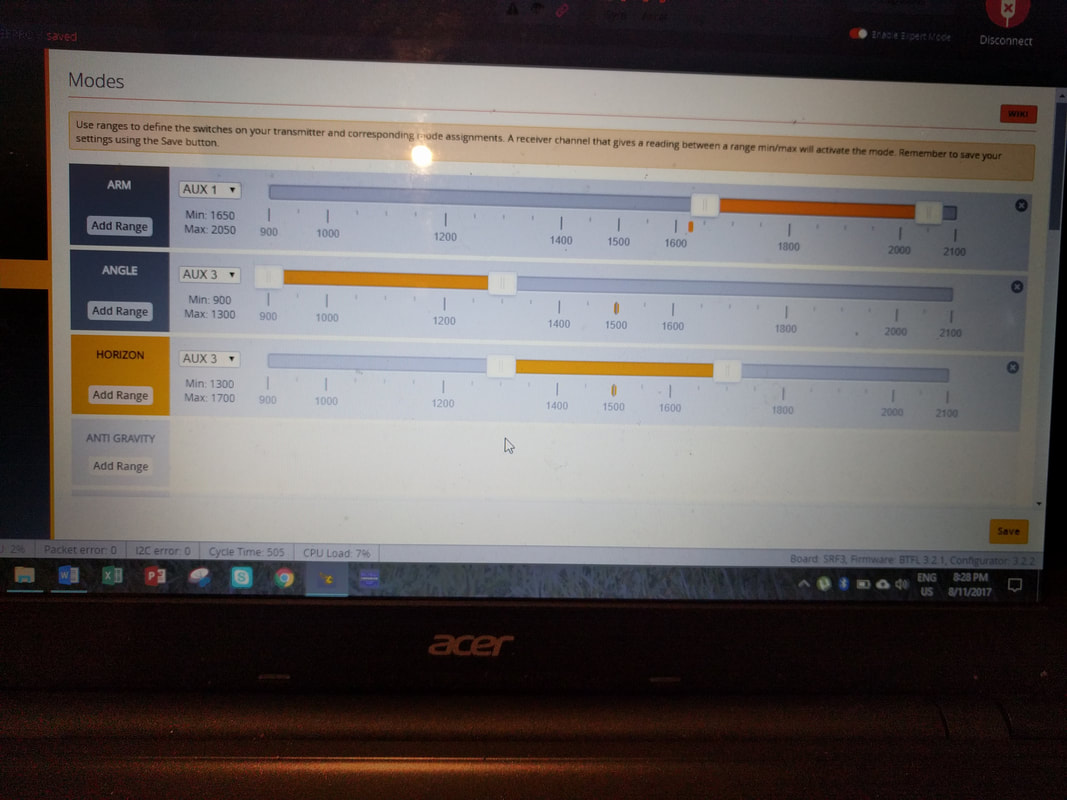
 In part 1 of this build we looked at the JJRC H36 quad and LST All In One (AIO) camera/VTX to make a budget yet powerful tiny whoop. One of the limitations of this build is the small remote that, although proportional has poor fine control due to size and low quality 'gimbals'. In part 2 I'll turn this from a toy quad to a hobby quad with the addition of the Furibee F3 flight controller which will allow you to use your proper transmitter (Frsky, DSM or Flysky) and have the full control of betaflight.  Size comparison of the JJRCH36 stock trasmitter compared to the Flysky i6s The advantage of running a full size remote is for better finger control. The advantage of running a betaflight flight control system is absolute control over all flight functions - angle, horizontal, acro modes, multiple rates set to switches and the least sexy but probably key is a proper failsafe system to prevent fly-aways  Furibee f3 flight controller with a flysky RX2a pro micro reciever wired in for ibus Furibee f3 flight controller with a flysky RX2a pro micro reciever wired in for ibus First a word of warning. The Flysky version of this board only supports AFDHS and not AFDHS 2a. This means you cannot use the Turnigy evolution nor the FS/TGY-i6s. I made this mistake and so have had to add the RX2a pro receiver which thankfully there are at least pads for. Bad news is that this adds about $6 in cost and 0.8g in weight but the good news is I now have the faster speed and failsafe of an ibus rather than PPM system. For those using FRsky this does support RSSI and VBAT over telemetry. Physical install is simple and probably best described by the pics below with captions. Unfortunately I couldn't keep the sound module as only the speaker is external - the music source is integrated in the stock flight controller. Click to embiggen the pictures and see commentary In terms of setup in betaflight, I updated to the latest version of betaflight (3.2.1 at time of writing) and captured a few screenshots below where I made changes, particularly because I had never before set up betaflight with brushed motors - there are some specific differences. So how does it fly? The standard flight control will no doubt get you off the ground with a respectable ability to buzz around but the being able to use your own remote and run with all the options of betaflight it is like a whole new quad. It feels more agile and surprisingly much faster - probably because you have complete control over all angles. To be fair though acro is challenging indoors and I tend to stick with angle or horizon mode but with a greater maximum angle. Good news is on a still day this can easily be flown outdoors and since it has a decent reciever can get very good range.
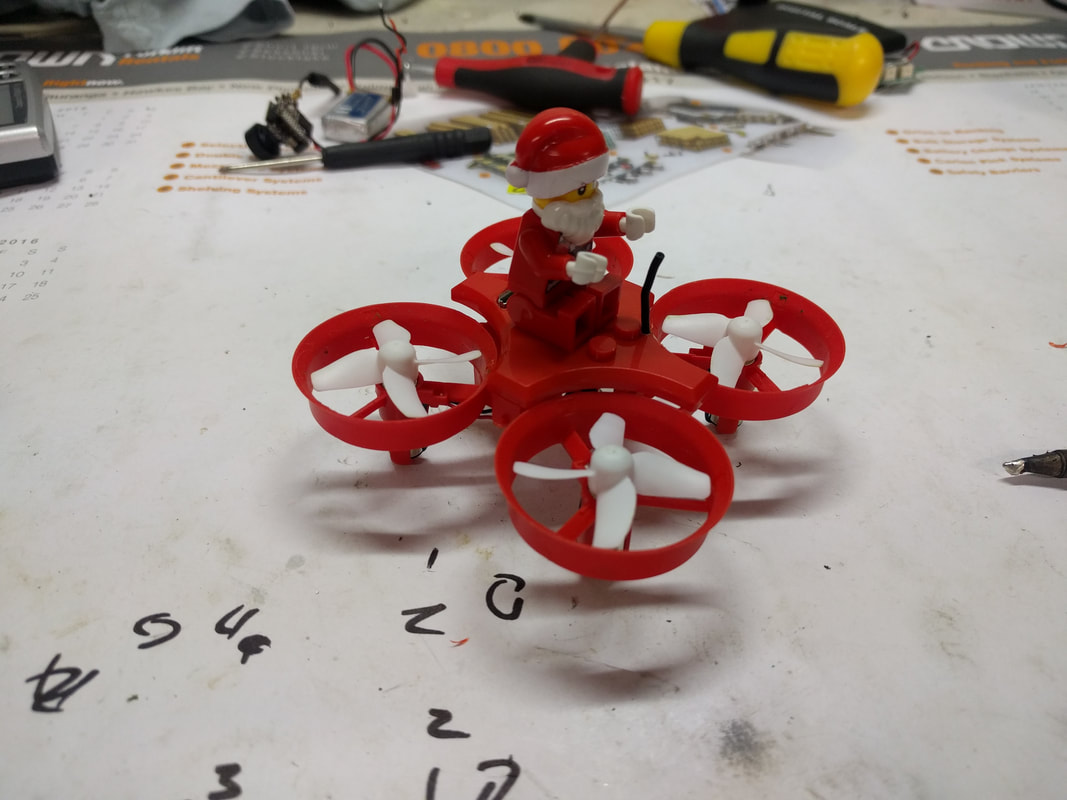
Flight time on the stock battery is around 4-5 minutes on the stock battery which is actually pretty awesome compared to the 2-3 minutes you get on the 6mm motor whoops. I think this is because the 7mm motors hit a sweet spot in efficiency that allows the larger 260mah battery. I don't really feel agility is significantly compromised either - especially with the extra power and flight time that is gained. That is because these larger motors spend less proportion of energy just getting the quad and FPV gear (and santa!) off the ground leaving more in reserve for actual flight and manouvers. Will it powerloop? No, that is more the realm of micro brushless but I'm still yet to see and indoor flyer that is as practical and safe as the ducted whoop style. My final conclusion is that the JJRC santa quad and LST AIO camera is a lot of fun on it's own but for the extra $20 or so for the furibee flight controller, it really comes alive. Final note: It is possible to bind a taranis or flysky remote directly to the stock flight controller using a multiprotocol module. These can be more expensive and fiddly than a betaflight flight controller however they can be used with multiple toy models. Futhermore the stock flight controller can actually be 'hacked' to insert dual more angle/acro software but some basic hardware and software fiddling is required. I'd recommend googling silverxxx acro firmware, notfastenuf and CaninoRC for more details, particularly on RCGroups, Micro Motor Community and Youtube. Some great resources put together by talented people if you are willing to put the time in to implement.
0 Comments
Leave a Reply. |









Thanks for visiting QuadifyRC.com Follow us on facebook below to get all the latest updates