 This is the build log for my floss 2 racing 5 inch quad that is based around the HGLRC F428 TX20 Elf 20mm x 20mm electronics. In part 1 I covered the reasoning behind all of the components in the build. Although this kit does include a micro CCD camera, I ended up using it on my Leader 120 since it was slightly lighter. I'll cover the steps that can be seen in each of the photos below. Click on the pictures to embiggen.  Motors and frame. So yeah, skipped a few steps to get to this point but I was a bit excited getting it together: -Raceday quads Returner R2 2450kV motors were attached to arms using screws with loctite. Heat shrink placed over the arms with wires inside for a clean look and to keep wires away from possible prop strike or tangling. -Hyperlite Floss 2 5" frame assembled  Strengthening the ESC battery pads This part is important. I've seen people mention that earlier reports of other HGLRC ESC have had VBAT pads wripped off when batteries have ejected on crashes. In addition these pads are small and I'd struggle to get a connection even with 16 gauge wire - the minimum I'd want to use on this build. The solution I used was to take some copper strand from the core of home wiring and thread as many as possible through the VBAT holes. Then twist tight and trim to about 4mm long. It's not shown in this image but then tin the pads and wire with a good hot soldering iron - I used 380°C on my TS100 soldering iron.  ESC and receiver mounting Here the ESC has been mounted on the supplied m2 nylon standoff which have been attched to the frame with m2 x 6.5 screws. A FS82 flysky receiver that I previously bound was heatshrinked with power and signal wires passing underneast the ESC. I'll replace this later when I upgrade to the FRSKY Taranis Q X7S. Note the orientation of the ESC. Motor pads need to go to front and back as the FC must rotate with ESC due to pin connection. If the pads go side to side then the USB port on the FC becomes inaccessable at the front or back. 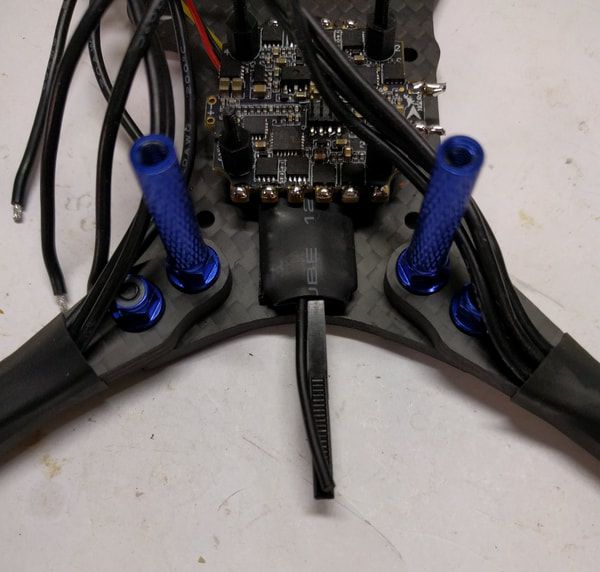 Rx antenna strengthening Shoved the end of a cable tie between reciever and heat shrink here. Added heatshrink on top of this and the monopole antenna to keep it stiff andaway from props.  Motor wire connection Motor wires solder up to ESCs. Order is not important as this can all be changed via software in BL Heli and Betaflight.
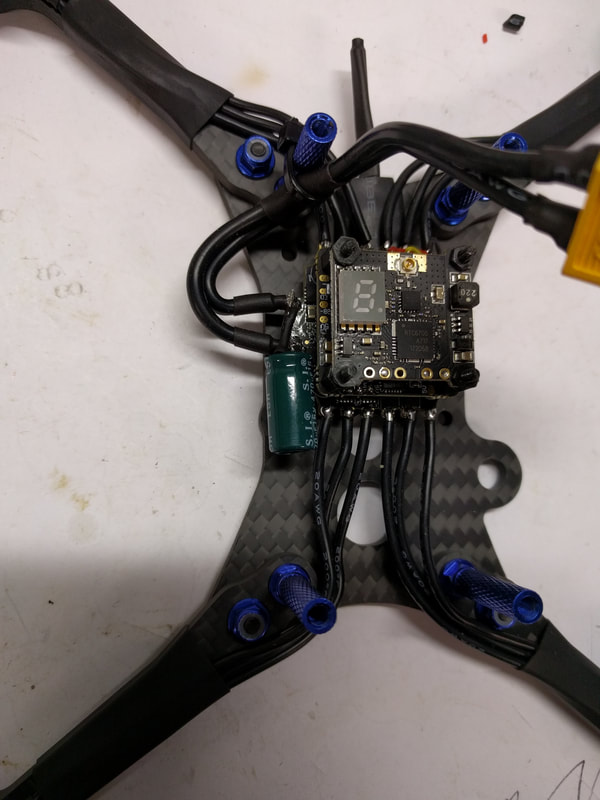 VTX wiring and capacitor 5 things in this image: -Flight controller added to stack -XT60 added with cable tie to right rear standoff for strain relief. Wires had extra heat shrink so rubbing doesn't wear the insulation off. -Capacitor added - 25VDC 470 micro farad to supress potential electrical noise -Receiver soldered to the flight controller -VTX wired and added to stack  FPV camera mounting Runcam micro swift 2 added to the TPU mounts to check for size. Heaps of room!  FPV camera wiring to FC Camera has been wired up here with the F428 flight controller having unique pads at the front of the board specific for the camera - 5v/ground/Vin - very clean and easy to wire.  Finishing up and software updates Here is the money shot with all the software updates and changes done: -BL Heli updated to 16.3 with motors running reverse -Betaflight updated to 3.2.1 with Omnibusf4 target -Top plate and props added -OSD turned off in swift micro due to betaflight OSD Summary
In summary this was head and shoulders the easiest build I have done thanks largely to the HGLRC XJB F428 TX-20 Elf electronics. Why? No wires between ESC and FC, all pads for the vtx at the back, all pads for the camera at the front and ESC, FC and VTX fit in a nice small, light stack. The only down size was the small VBat pads which I think I have a good solution for however only time will tell. The build is light and well enclosed so should be strong. Everything fired up perfectly first time with no smoke which is always a bonus. So far as the build is concerned I am very pleased with all the components I've chosen here but I really need to put them to the test in flight to be sure.
8 Comments
 This year I have decided to try racing with Multi GP in my local NZ chapter and rather than using my trusty but heavy Martian II, I will be building a new 5" lightweight racer. I've decided to break this into 3 parts to cover in detail what is going on: 1. Parts choice and reasoning 2. The build 3. First flight and performance Build objectiveI find with a new build that sticking with a clear primary objective will help you better choose your compoents. My objective for this build was lightweight and durable, built specifically for multi GP racing rather than a jack of all trades. Durability includes reliability since gear failure is probably the most disappointing way to DNF based on my days racing RC cars. Parts choice and justification GLRC XJB F428 - TX20 - ELF F4 Flight Control System - As soon as it was announced I new this would be perfect for the floss 2 frame I'd already pre-ordered. Why did I choose this:
My only concerns are: will the VTX signal be clean enough for group racing? Are the ESC VBAT pads too small for a suitable wire size (16AWG)? Can this actually push 2205 or will it go up in flames or less spectacular blue smoke?  Hyperlite Floss 2 5" frame - The only issue I had in choosing this one was to decide between this and RCAddicts newly designed Mode 2 Ghost frame. Very much neck and neck but the floss 2 was available locally with immediate delivery. Why I chose:
More of an observation than a requirement but the frame is also simple, easy to build and service.  RACEDAYQUADS BADASS 2205 2450KV NAKED BOTTOM RACING MOTORS - I always knew I wanted a mid kV 2205 motor for this build to stay light. I looked at the various returner r2 variants and decided the raceday quads were perfect due to the 7075 aluminium. Notable mention to CATALYST MACHINEWORKS FREEDOM 2205 MOTOR and Returner R2 Ghost Edition 2205 2555kv. Why I chose:
 DALPROP T5045C Cyclone 5 Inch 3 Blade Propeller Props are of course a personal choice but I'll be starting with my favourite brand Dal prop. I chose not to start with the Cyclone 2 5046 to try keep the current draw down a little.
Why I chose:
|
Archives
August 2018
Categories |
 RSS Feed
RSS Feed
Thanks for visiting QuadifyRC.com Follow us on facebook below to get all the latest updates