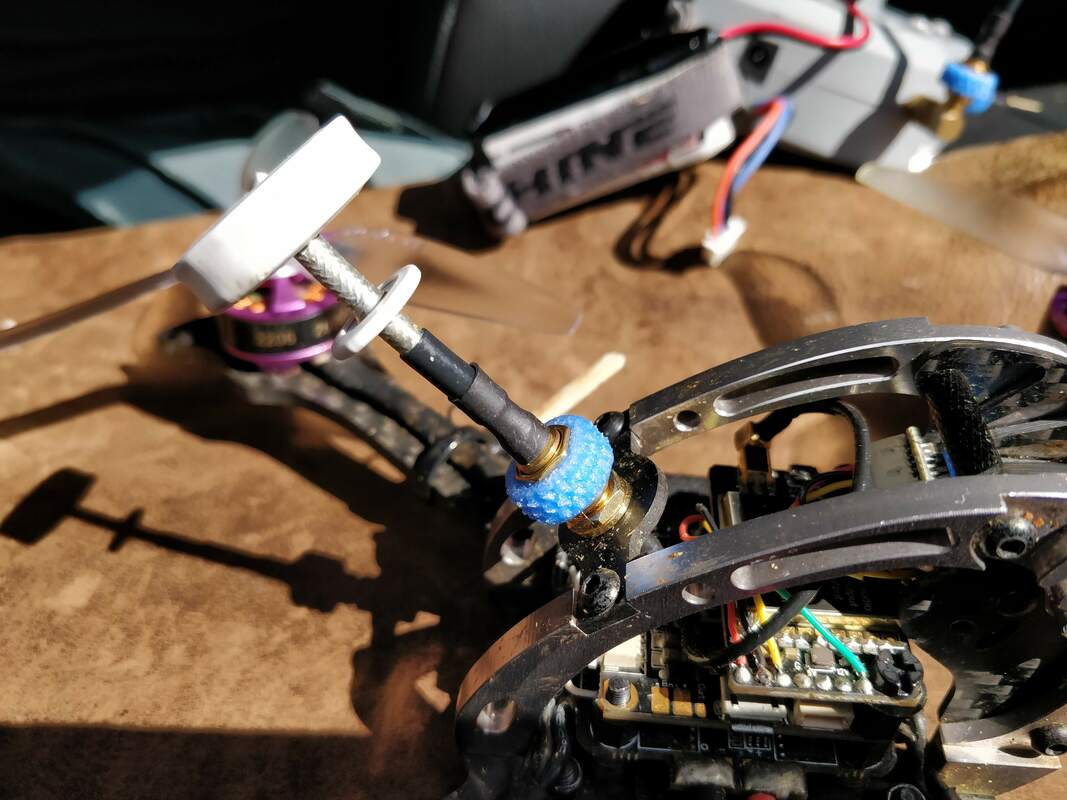
I promise I'll keep this one short. We are forever taking antennae on and off our quads and goggles as we arrive and leave our flight locations. I'm guilty of being too eager to get in the sky and not tightening my antennae correctly thereby leaving a poor connection to the active element on both the quad and goggle ends. Using a spanner is not a fix I'd recommend as it is easy to over-torque and damage the antenna or mount.
The fix here is really easy and I got the tip from my favourite VAS antennas which all include a plastic knurled grip (now I know why). Using a knurled grip that sits over the hexagonal drive on an SMA-style connecter allows you to get a better grip and more torque on tightening whilst avoiding over torquing as above. To put this another way - using these grips allows you to get the right tightness every time - good for the best connection and it will also help them coming loose in flight.
0 Comments
 I did a thing. After reviewing the new FullSpeed TinyLeader 2s-3s brushless whoop (review here) I learnt to fly around the heavier weight which has come about because of it's larger motors and better FPV system. I still think that 1103 motors like on the TinyLeader and Beta75x are better suited to a lightweight 2" propeller like my ultralight build here rather than the 40mm props (1.6") as we see so commonly on the brushless whoops now. I decided to put my money where my mouth is so to speak and prove it rather than just hypothesing.
To those of you that choose to upgrade the vtx in your hawk 5, like I did with the AKK infinite VTX/DVR (in this walkthrough here) I've updated my recommendation for the powersupply. Previsouly I relied on the flight controller's 5v BEC circuit that also powers the receiver and of course the board itself. I've now updated this recommendation to use the VBAT (or VCC) power supply instead assuming of course your VTX can take up to 24V as most modern full-sized VTXs can, including the AKK infinite I installed. This is because the BEC struggles at higher output making the video feed noisy. Over the longer term this is likely to irreversible damage the BEC rendering the flight controller pretty well useless but not before having random failures as a result of the compromised BEC. Picture below is using the power supply from the original VTX - the flight controller's 5V BEC:
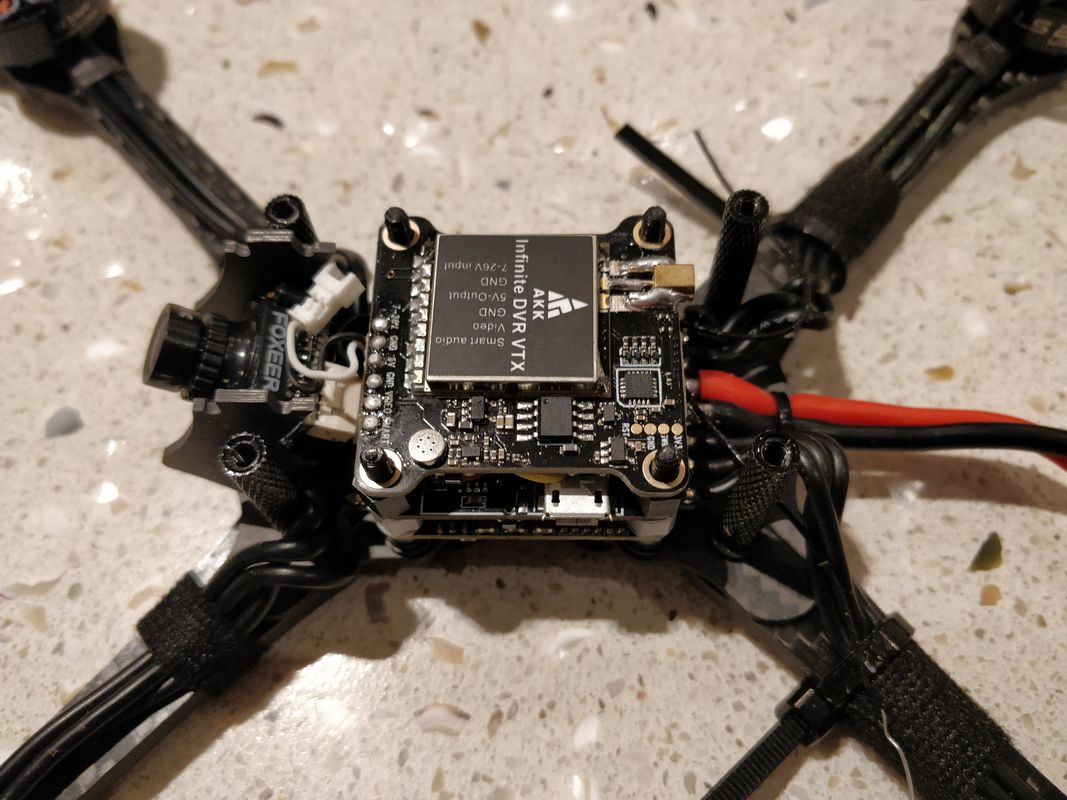 Sneak peak of the finished product Sneak peak of the finished product The Emax Hawk 5 is arguably the best bind and fly quadcopter going as I found in my initial review but can also be greatly improved with a few budget modifications as I wrote about in my blog on bang for buck improvements. I do however see a number of people complain about the stock Emax Hawk 5 vtx however mine has been functioning well. That being said, you cannot adjust setting in betaflight OSD via smart audio or tramp telemetry which is a let down on a 2018 quad. In the interest of sharing I've removed the stock VTX and replaced with one of the larger VTXs currently available (the AKK Infinite VTX/DVR) to prove it can be done.  The VTX I chose for this project is the AKK Infinite which incorportates a DVR into the VTX The VTX I chose for this project is the AKK Infinite which incorportates a DVR into the VTX The VTX The VTX I chose is the AKK Infinity DVR VTX. This is very similar to the HGLRC VTX/DVR that was reviewed here. As the name suggests this is a smart audio VTX in 30.5mm VTX with a built in DVR. I chose those for 2 reasons: First it's big. If I can fit this in you can fit anything! Secondly I like the DVR for recording breakup-free footage. For me I like the nimbleness of the Hawk 5 and don't want to weigh it down with a HD Cam. Other key features of the VTX/DVR:
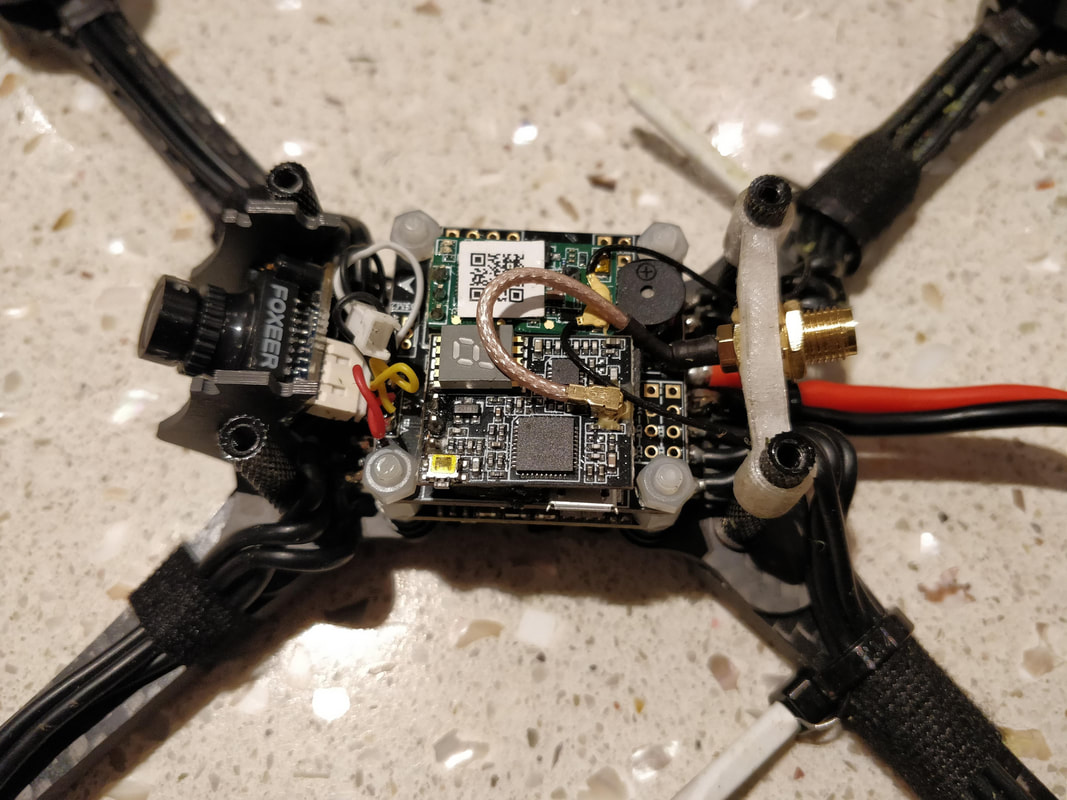
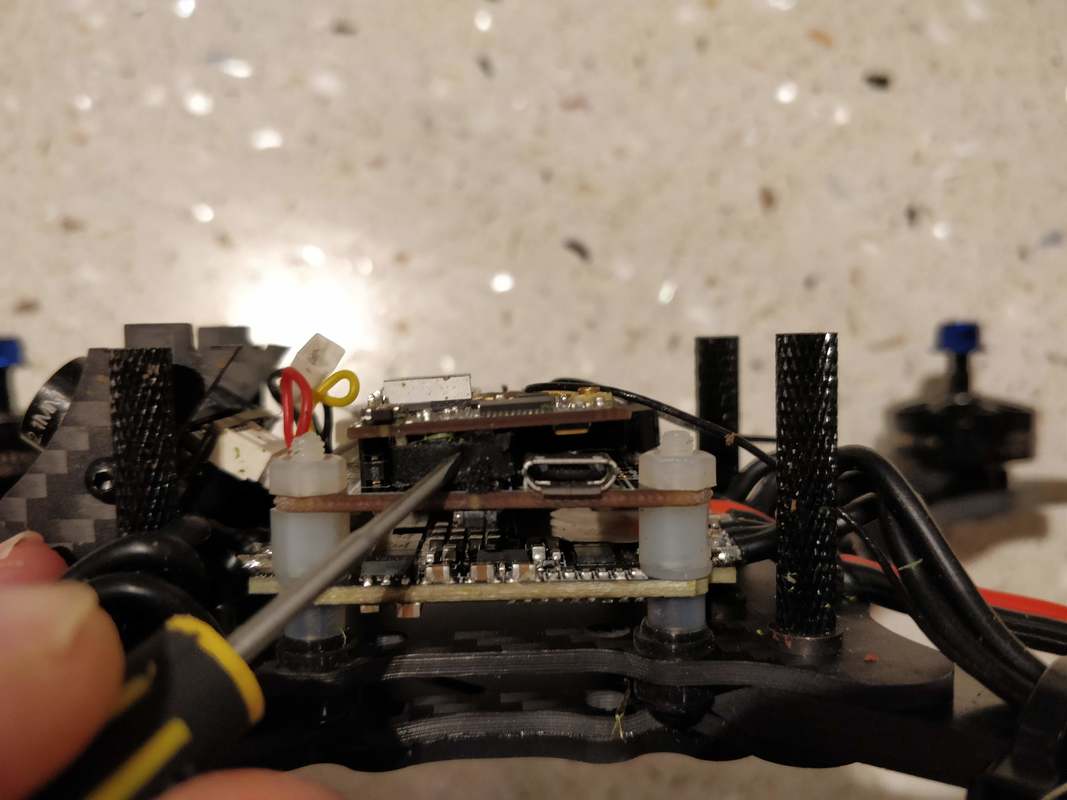
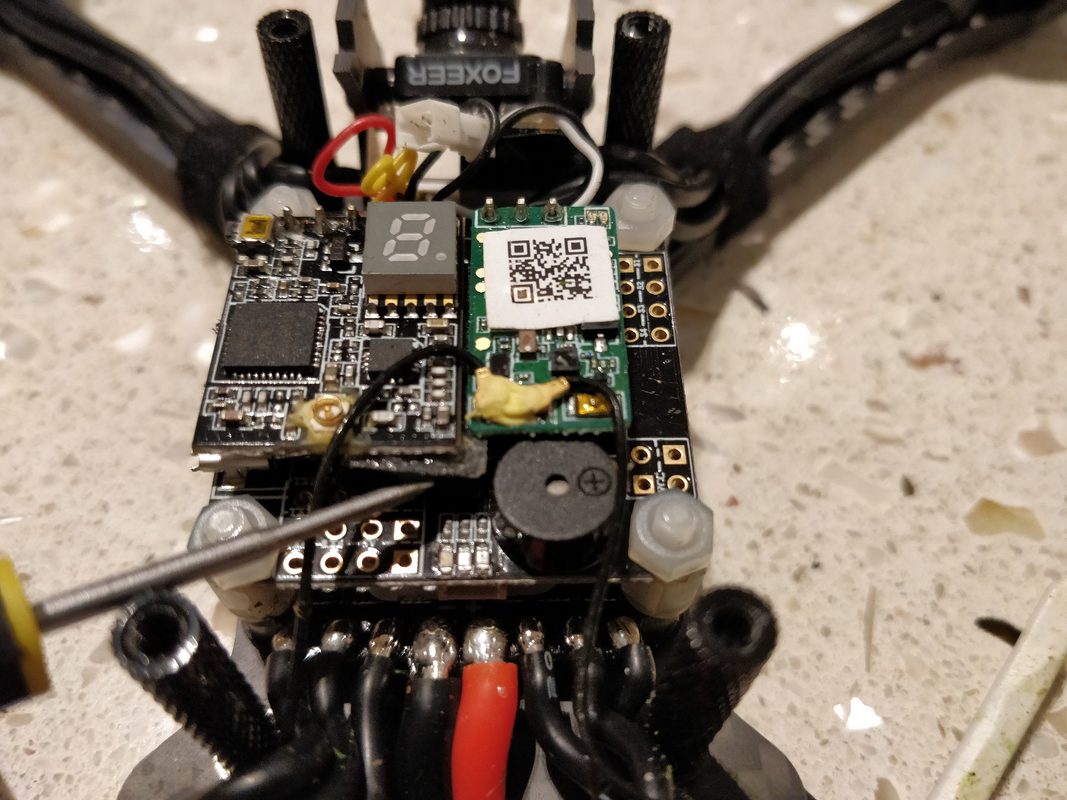
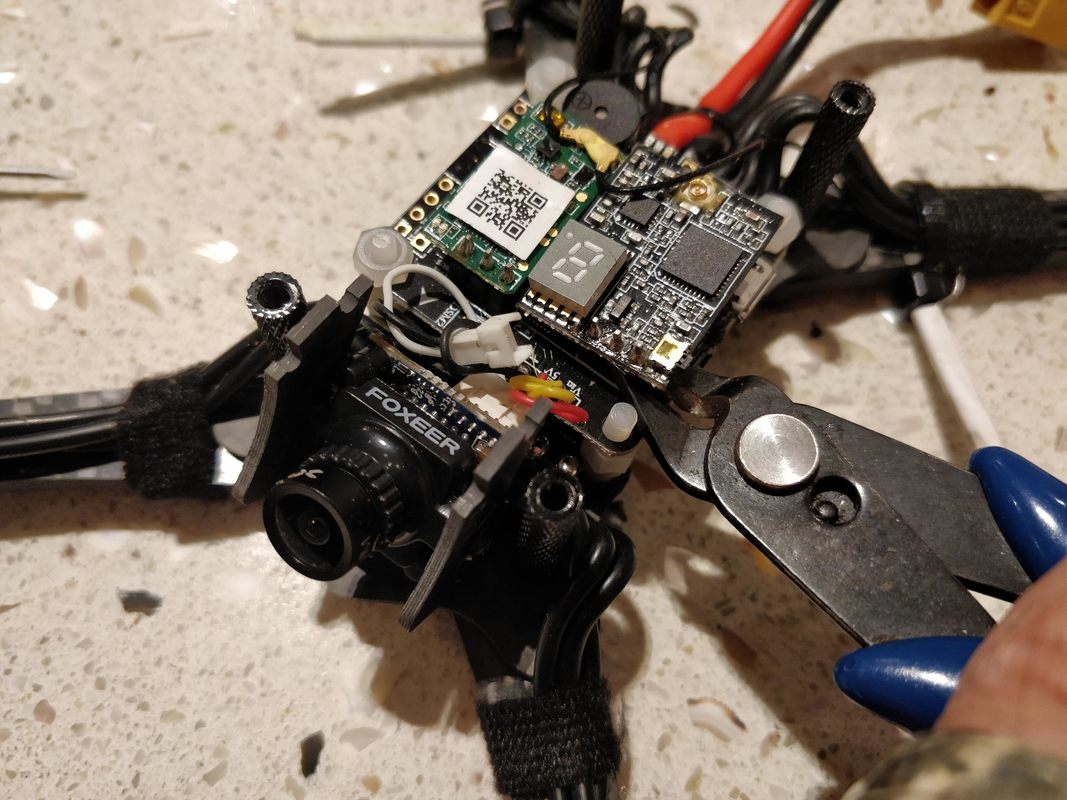
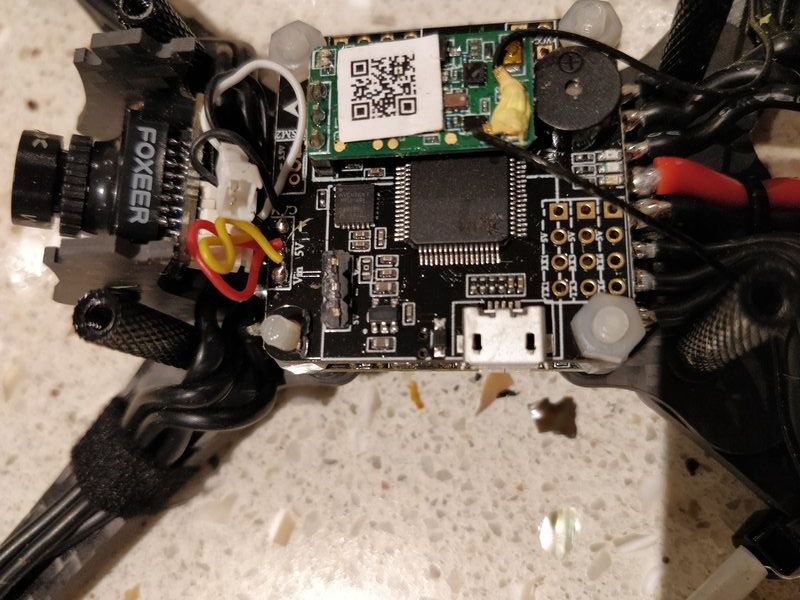
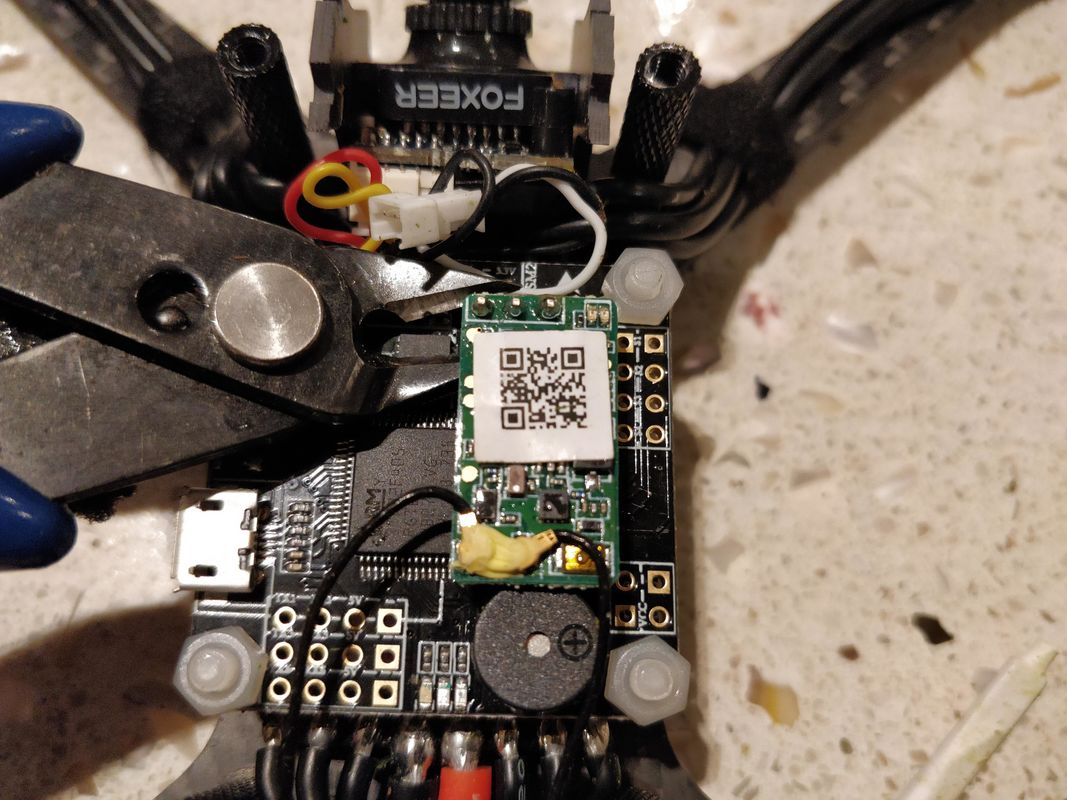
Other parts Just quickly I used the following tools and parts in the instructions below: The install Please note all the pictures below relate to the install of the AKK Infinite but install should be identical or at least nearly the same for others. I had to remove the buzzer and relocate the receiver for this VTX but depending on the size of the VTX you install you may need to do only one or neither. Follow picture left to right then down. All pictures will enlarge if you click on them.
|
Archives
November 2020
Categories
All
 |


 RSS Feed
RSS Feed
Thanks for visiting QuadifyRC.com Follow us on facebook below to get all the latest updates