 The Happymodel Mobula7 uses a F3 based flight controller and since Betaflight 3.4, these boards have not had full functionality of F4 and F7 boards due to smaller memory size for firmware storage. However in this article I will cover how to upgrade to the performance edition of Betaflight 4.04 kindly compiled by UAVTech (his in depth YouTube Channel is here). This special version adds the key performance functions at the cost of typically irrelevant features like servo control, acro trainer, camera control etc. In this article I will show you where to access this firmware and then I'll show you the filters that suit brushless whoops best as well as some good starting PIDs. This is the seventh and likely final article in my series of HappyModel Mobula7 upgrades, many of which can be used for the Trashcan too. Also to come are:
Betaflight 4 Performance edition for F3 boards This is the final version of Betaflight you can use and I strongly recommend you use this version rather than the one on the Betaflight configurator to get full performance functionality otherwise you will miss out on features like:
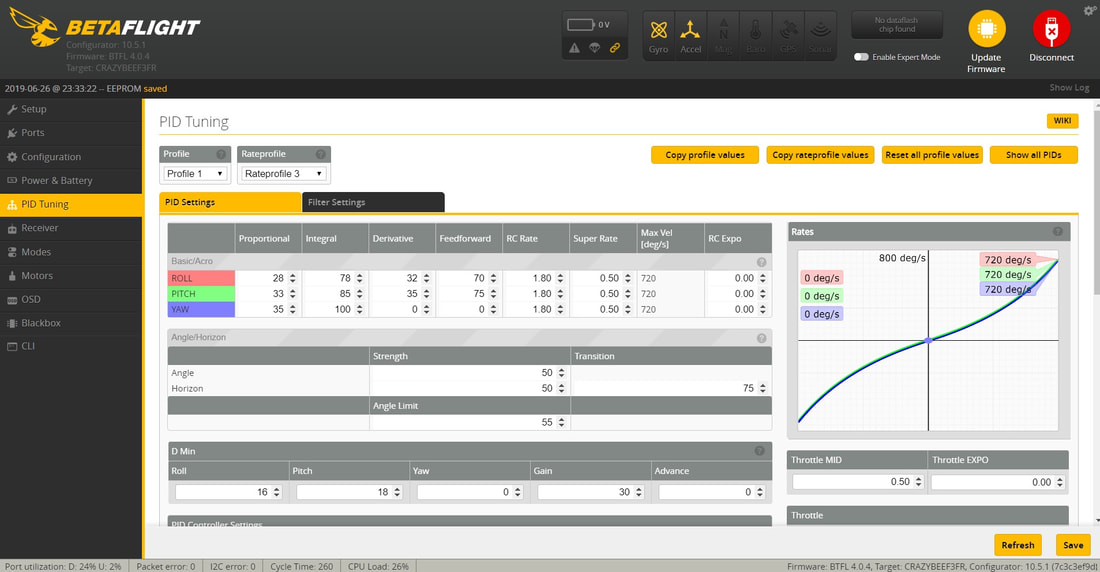
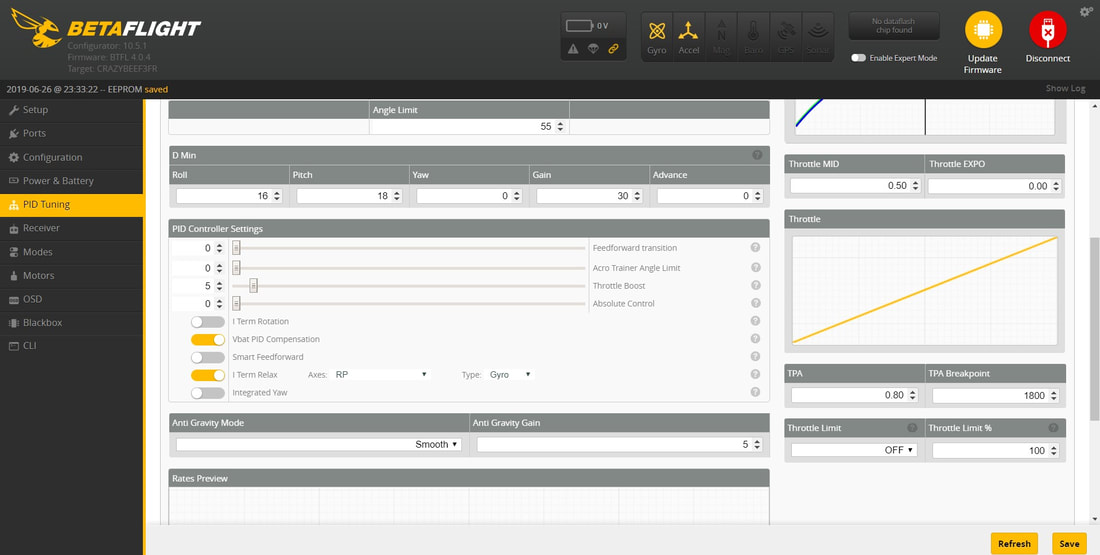
Filter setup I'll keep this simple and will recommend the community preset for 'brushless' whoop (credit again to UAV Tech). Filters are customised to the higher RPM (hence frequency that these small motors run and resonate at. This is more important than the PIDs Copy/paste below into your CLI: set gyro_lowpass_type = PT1 set dyn_notch_min_hz = 150 set dyn_lpf_gyro_min_hz = 150 set dyn_lpf_gyro_max_hz = 750 set dyn_lpf_dterm_min_hz = 150 set dyn_lpf_dterm_max_hz = 250 set dterm_lowpass_type = BiQUAD set dterm_lowpass2_hz = 0 Alternatively you can enter into the Betaflight GUI as per the screenshot below. Note: I recommend these settings for all brushless whoops including the Mobula7, Eachine Trashcan, Emax Tinyhawk etc. 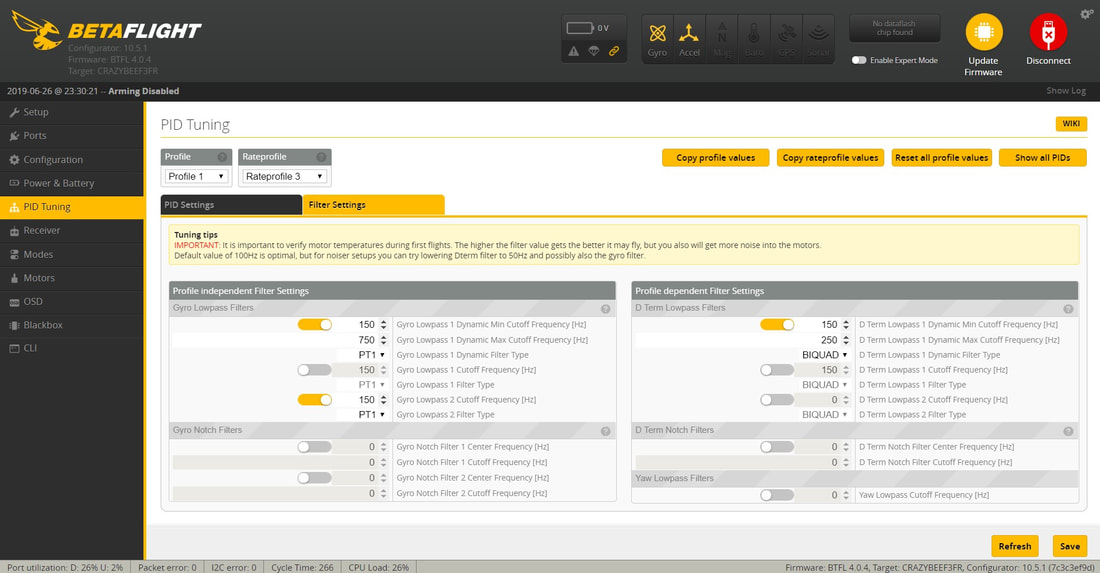 Recommended PIDs I've seen no need to change the PIDs that are also recommended in the community presets. Once oscillations are taken care of PIDs are more of a 'feel' thing. I've been happy with these PIDs, they are certainly better for me than default: set vbat_pid_gain = ON set anti_gravity_gain = 5000 set p_pitch = 33 set i_pitch = 85 set d_pitch = 35 set p_roll = 28 set i_roll = 78 set d_roll = 32 set d_min_pitch = 18 set d_min_roll = 16 set d_min_boost_gain = 30 set d_min_advance = 0 And again with the screenshot if you'd prefer (click to embiggen):
My Diff All If you want to use or review betaflight exactly as I run it on my own Mobula7, I have attached my "Diff All" file below:
Summary of software improvements Wow. Not since I've flown my NFE silverware brushed whoop have I enjoyed so much control. I'm not a great pilot but even flying at night in poor lighting conditions I felt fast and largely in control. Flight was predictable and I was able to put the quad where I wanted practically all of the time. Below is a DVR of me flying at night in my backyard. There's no wind which is a welcome relief. This flight was done with a 75% throttle limit on a 2s 300mah battery and low rates (about 300 deg/s max on yaw, pitch, roll). I hope you enjoy these settings as much as I do. And this will round out my series of Mobula7 upgrades. It's been fun tinkering with this very popular brushless quad for the last few months and these software settings finally connect all the hardware improvements and customisations I've made over this series. Click here to see all of them Thanks for reading, if you found this article useful please feel free to like or share, the facebook links below directly link/like this article. Links are affiliated and help me buy the bits I need to produce this type of content. If you are looking for quads or parts check out my coupons and discounts page which I keep updated with only the parts and quads I like at a proper discount.
My favourite parts for the mobula7/trashcan:
16 Comments
jack
5/7/2019 10:46:10 pm
FInally good PIDs for me:D Thanks!
Quadify RC
29/7/2019 04:40:10 pm
Glad that it worked for you. I think the filters may actually me more beneficial than the PIDs since they are more tuned for the higher frequency that these tiny motors operate at - try them as well in case you haven't already.
Kakao
30/7/2019 06:16:43 pm
Hello, can you post this for BFL 4.0 for the F4 boards?
Kakao
2/8/2019 05:56:25 pm
THANK YOU!
Quadify RC
7/8/2019 08:58:45 am
My pleasure. Glad to hear it worked well even with the V3 frame and the heavier battery. Happy flying!
Jace
2/9/2019 08:14:44 am
LED strip doesn't seem to work in this version of the firmware
Quadify RC
9/9/2019 12:47:22 pm
Probably not - most 'unnecessary' features needed to be stripped to make room for the flight performance goodies. Simply not enough memory for it all on a F3 processor.
BrinkFPV
29/10/2019 04:29:01 pm
Hello JACE
Quadify RC
29/10/2019 08:42:57 pm
Nice information, thanks for sharing!
Scott
23/12/2019 07:54:27 pm
I am not able to get my LED on my Mobula7 working. It was working before on my old 3.5.7. Just flashed the Performance Edition of 4.1.1 EA3. Tried the CLI commands and it is off. Does overclocking through the LED off?
Tyler durden
9/11/2019 06:55:58 pm
I used this tune but updated to the latest 4.1 performance edition and flashed JESC (cost. 5$) and now have rpm filtering and wow it flies amazing, highly recommend trying it if you have the time.
Quadify RC
11/11/2019 11:36:40 am
Yeah that is defenitely the way to go now. It was always about getting the filters right rather than pids to make micros and bigger quads fly better and now rpm filtering does this flawlessly.
MICHAEL LABUSCHAGNE
18/12/2019 10:08:59 am
hi there .. i have trashcan and upgrade to bf 4.1 and jesc upgrade but for some reason no matter what i do my motors remain scorching hot and quad sometime unpredictable especially roll after back flip power loop type move my quad seems to bee extremly twitchy.. running standard pid and filters by j bardwell..really strange cause except for hot motors my eachine reddevil does the same actually causing huge crashes...2s on trashcan and 3s very bad on reddevil...very desperate but very frustrated...please help..
Brennan
12/11/2019 05:20:26 am
Are you running the filter settings above with RPM enabled, or did you you make any tweaks?
Robert Moore
24/1/2020 09:23:53 am
Tyler how did u flash jesc?
Alec Moffat
14/3/2020 04:42:32 am
Did we loose led with 4.1? Did you use the same setting in 4.1 as 4.0? Leave a Reply. |
Archives
November 2020
Categories
All
 |
||||||||||||||||||||





 RSS Feed
RSS Feed
Thanks for visiting QuadifyRC.com Follow us on facebook below to get all the latest updates